2019年7月4日

HiFive Unleashedの動作周波数
目次: RISC-V
SiFive FU540のコア動作周波数は簡単に見ることはできなかったので、求め方をメモしておきます。
アドレス0x10000000にPRCI(Power Reset Clocking Interrupt)のレジスタがありますので、実機でその辺をダンプします。
突然ダンプしますって言われても、どうしたら良いんですか?という方は拙作のmemaccess(GitHubへのリンク)をお使いください。使い慣れたツールがあれば、RISC-V上でビルドすれば使えます(UnleashedはLinuxが動くので)。
私の持っているHiFive Unleashedでは下記のようになっていました。
PRCIレジスタ領域のダンプ
10000000 c0000000 82110ec0 00000000 82110dc0 10000010 80000000 00000000 00000000 82128ec0 10000020 80000000 00000000 0000002f 00000004
COREPLL周波数を司るレジスタは、corepllcfg0(offset: 0x04)です。値は0x82110ec0ですね。
- [ 5: 0] divr = 0x0
- [14: 6] divf = 0x3b = 59
- [17:15] divq = 0x2
- [20:18] range = 3'b100 => 33MHz
レジスタの各フィールドはこんな意味になっています。計算式は、
COREPLL周波数の計算式
COREPLL = 33.33MHz / (divr + 1) * 2 * (divf + 1) / 2 ^ divq
ですので、上記の値を当てはめますと、
COREPLL周波数
COREPLL = 33.33MHz / (0 + 1) * 2 * (59 + 1) / 2 ^ 2 = 33.33 * 120 / 4 = 999.99MHz≒1GHz
すなわち1GHz駆動であることがわかります。
ウソは書いていないつもりですが、情報源が気になる方はFU540の仕様書 "Chapter.7 Cloking and Reset" の章を見てください。
FU540の仕様書はSiFiveのサイト(FU540のサイトへのリンク)から、誰でもゲットできます。ページの下側かつ左側にある "FU540-C000 Manual" と書いてあるリンクです。
ARMの場合は簡単
Unleashedは面倒でしたが、Rockchip系(に限らないと思いますが)のSoCは /sys/devices/system/cpu/cpu*/cpufreq/cpuinfo_max_freqを見ると簡単に最大動作周波数を取得できます。
RK3328の各コアの最大動作周波数
$ for i in /sys/devices/system/cpu/cpu*/cpufreq/cpuinfo_max_freq ; do echo $i; cat $i; done /sys/devices/system/cpu/cpu0/cpufreq/cpuinfo_max_freq 1296000 /sys/devices/system/cpu/cpu1/cpufreq/cpuinfo_max_freq 1296000 /sys/devices/system/cpu/cpu2/cpufreq/cpuinfo_max_freq 1296000 /sys/devices/system/cpu/cpu3/cpufreq/cpuinfo_max_freq 1296000
RK3399の各コアの最大動作周波数
$ for i in /sys/devices/system/cpu/cpu*/cpufreq/cpuinfo_max_freq ; do echo $i; cat $i; done /sys/devices/system/cpu/cpu0/cpufreq/cpuinfo_max_freq 1416000 /sys/devices/system/cpu/cpu1/cpufreq/cpuinfo_max_freq 1416000 /sys/devices/system/cpu/cpu2/cpufreq/cpuinfo_max_freq 1416000 /sys/devices/system/cpu/cpu3/cpufreq/cpuinfo_max_freq 1416000 /sys/devices/system/cpu/cpu4/cpufreq/cpuinfo_max_freq 1800000 /sys/devices/system/cpu/cpu5/cpufreq/cpuinfo_max_freq 1800000
簡単で良いですね。こういう細かい使い勝手はRISC-Vはこれからでしょうか。とはいえ世界はRISC-V旋風が吹き荒れているそうなので、次第に充実していくことでしょう。
メモ: 技術系の話はFacebookから転記しておくことにした。大幅に追記。
コメント一覧
- コメントはありません。
 この記事にコメントする
この記事にコメントする
2019年7月5日
ARMとRISC-VでCoreMark対決
目次: RISC-V
先日購入したHiFive Unleashedが異様に遅く感じるので、手持ちの64bitコア同士でベンチマーク対決をしてみました(2019年12月5日、Raspberry Pi 3の結果を追記)。以前、モナコインのマイナーでベンチマークしたとき(2019年5月27日参照)は、Cortex-A53の1/4くらいの性能でした。
- Rockchip RK3399(Cortex-A72 / 1.8GHz x 2, Cortex-A53 / 1.4GHz x 4)
- Rockchip RK3328(Cortex-A53 / 1.3GHz x 4)
- Broadcom BCM2837(Cortex-A53 / 1.2GHz x 4, 32bit mode)
- SiFive FU540(Rocket / 1GHz x 4)
ベンチマークはCoreMarkを使いました。コンパイル条件は下記の通りです。
- RK3399, RK3328: GCC-6.3.0 Ofast
- BCM2837: GCC-6.3.0 Ofast, 32bit
- FU540: GCC-8.3.0 Ofast
RK3399, RK3328はDebian arm64 Stableを使っています。StableはRISC-Vに対応していませんので、FU540だけはDebian riscv64 Unstableを使っています。BCM2837はRaspbianです。
測定の結果は、
- RK3399: Iterations/Sec : 10242.753252
- RK3328: Iterations/Sec : 4427.390791
- BCM2837: Iterations/Sec : 4008.016032
- FU540: Iterations/Sec : 2255.130422
RK3328とFU540は2倍の差です。動作周波数の差は1.3倍ですから、インオーダーのコア同士にしては性能差があります。
RK3399は異様に速いです。もしかするとA72側で動いているかもしれません。CoreMarkは特定のCPUに張り付ける方法が良くわからないですね……。
メモ: 技術系の話はFacebookから転記しておくことにした。多少追記。後日追記。
コメント一覧
- コメントはありません。
この記事にコメントする
2019年7月7日
Debian Busterが来た
いつもやっているapt-get dist-upgradeを実行して、ろくに読まずにYes, Yesと適当に答えていたら、家のサーバーのDebianをStretchからBusterにアップグレードしてしまいました。
アップグレードすること自体に何も悪い点はないですが、何も今日、刈谷のホテルからやる必要は全くなかったなあ、と反省しきりです。これで起動しなくなったら、明日の夜にアクセスできなくなって困りますね……。
今回は幸いなことに再起動後も元気に動作していたので、何ら被害はありませんでした。設定を大幅に弄っている場合など、たまに起動しなくなることがあるので、今後は遠隔地から大胆なアップデートをするのはやめておきます。
メモ: 技術系?の話はFacebookから転記しておくことにした。追記&文を組み換えた。
コメント一覧
- コメントはありません。
この記事にコメントする
2019年7月12日
OpenVX on OpenCL
目次: OpenCL
会社の人にOpenVXの別実装があることを教えてもらったので、試してみました。
以前、ソフトウェア実装のOpenVXライブラリを動かしました(2018年11月14日の日記参照)が、AMDのOpenVXの実装(GitHubへのリンク)を使うと、GPUでOpenVXを動かすことができます。
AMDのOpenVX実装ではありますが、OpenCLを使うのでGPUはRadeonである必要はなく、IntelのGPUでもOKです。これが共通APIたるOpenCLの良いところですね。私は現状Radeonを持っていませんので、Intelの内蔵GPUで動かしてみようと思います。
動かし方
まずOpenVXライブラリをビルドします。Debianであればopencl-c-headers辺りが必要になるはずです。またGPUドライバとしてIntel GPUドライバのOSS実装であるbeignetを使います。Debianであればbeignet-dev, beignet-opencl-icd辺りのパッケージでインストールできます。
AMD OpenVXライブラリのビルド
$ git clone https://github.com/GPUOpen-ProfessionalCompute-Libraries/amdovx-core $ cd amdovx-core $ mkdir build $ cd build $ cmake ../ $ make -j4
テストには前回も活躍したOpenVXアプリを使用します。OpenCVのバージョンは3.2です。もし古いバージョンのOpenCVを使っている場合は -lopencv_videoioオプションを外してください(おそらく「そのようなライブラリは存在しない」とエラーが出る)。
OpenVXサンプルアプリケーションのビルド
g++ solution_exercise1.cpp -Wall -I../include \ -lopencv_video -lopencv_videoio -lopencv_highgui -lopencv_imgproc -lopencv_core \ -lopenvx -L/path/to/amdovx-core/build/lib
前回とほぼ同じですので、さほど難しくないと思います。
GPUの実力
ビルドできましたので、実行……をする前に、vxProcessGraphの前後に時間計測のコードを入れておきます。
時間計測のパッチ
diff --git a/tutorial_exercises/solution_exercise1/solution_exercise1.cpp b/tutorial_exercises/solution_exercise1/solution_exercise1.cpp
index c7b8e21..ebc07e5 100644
--- a/tutorial_exercises/solution_exercise1/solution_exercise1.cpp
+++ b/tutorial_exercises/solution_exercise1/solution_exercise1.cpp
@@ -30,6 +30,8 @@
* Kari Pulli <kari.pulli@gmail.com>
*/
+#include <sys/time.h>
+
////////
// Include OpenCV wrapper for image capture and display.
#include "opencv_camera_display.h"
@@ -368,6 +370,8 @@ int main( int argc, char * argv[] )
// Process the video sequence frame by frame until the end of sequence or aborted.
for( int frame_index = 0; !gui.AbortRequested(); frame_index++ )
{
+ struct timeval st, ed, el;
+
////////********
// Copy the input RGB frame from OpenCV to OpenVX.
// Use vxAccessImagePatch and vxCommitImagePatch APIs (see "VX/vx_api.h").
@@ -407,8 +411,11 @@ int main( int argc, char * argv[] )
// if the frame_index == 0 (i.e., the first frame of the video
// sequence), otherwise, select the feature tracking graph.
// 2. Use ERROR_CHECK_STATUS for error checking.
+ gettimeofday(&st, NULL);
ERROR_CHECK_STATUS( vxProcessGraph( frame_index == 0 ? graphHarris : graphTrack ) );
-
+ gettimeofday(&ed, NULL);
+ timersub(&ed, &st, &el);
+ printf("ProcessGraph:%d.%06d[s]\n", (int)el.tv_sec, (int)el.tv_usec);
////////********
// To mark the keypoints in display, you need to access the output
実行環境は下記のとおりです。
- CPU: Pentium J4205/1.50GHz
- Mem: DDR3L-1600 8GB x 2
- GPU: Intel HD Graphics 505/250MHz(J4205内蔵)
最初にソフトウェア版のライブラリを実行します。
OpenVXサンプルアプリケーション(ソフトウェア版OpenVX)
$ LD_LIBRARY_PATH=/path/to/openvx1.1/out/LINUX/x86_64/release/ ./a.out OK: FILE ../../tutorial_videos/PETS09-S1-L1-View001.avi 768x480 LOG: [ status = -1 ] Hello there! ProcessGraph:0.254740[s] ProcessGraph:0.183655[s] ProcessGraph:0.181082[s] ProcessGraph:0.180022[s] ProcessGraph:0.182914[s] ProcessGraph:0.180622[s] ...
最初のフレームはHarrisCornerによる角検出、それ以降のフレームはトラッキングに要した時間です(そういう内容のデモです)。トラッキングに大体180ms程度、掛かっている様子がわかります。
次に内蔵GPUで実行します。
OpenVXサンプルアプリケーション(GPU版OpenVX)
$ DISPLAY=:1 LD_LIBRARY_PATH=/path/to/amdovx-core/build/lib ./a.out OK: FILE ../../tutorial_videos/PETS09-S1-L1-View001.avi 768x480 LOG: [ status = -1 ] Hello there! LOG: [ status = 0 ] OK: OpenVX using GPU device#0 (Intel(R) HD Graphics Broxton 0) [OpenCL 2.0 beignet 1.3] [SvmCaps 0 0] ProcessGraph:0.030192[s] ProcessGraph:0.016439[s] ProcessGraph:0.015872[s] ProcessGraph:0.015629[s] ProcessGraph:0.015629[s] ProcessGraph:0.015679[s] ...
トラッキングに16ms程度しか掛かりません。正直言ってGPUとしてはローエンドの下の方ですが、J4205のCPU処理と比較すると圧倒的に速いです。GPU恐るべしですね。
コメント一覧
- コメントはありません。
この記事にコメントする
2019年7月15日
埼玉を洪水から守る
首都圏外郭放水路 庄和排水機場(埼玉県春日部市)の調圧水槽と第一立坑(たてこう)の見学に行きました。

首都圏外郭放水路とは、洪水多発地域の中川流域(埼玉県の東部)を洪水から保護するため、中川、綾瀬川といった中小河川の水を地下経由で引き込み、ポンプで引き上げて江戸川に放流する仕組みです。

ちなみに国の施設でして、管轄は国土交通省(サイトへのリンク)です。
見学
見学コースの一つである、調圧水槽は、地下神殿との呼び名もあるほどで、広大な空間とたくさんの柱があります。
柱の役割がわかっていなかったのですが、係の方の説明によると、周りの地下水の浮力で調圧水槽が浮き上がってしまうので、重い天井と柱で、水槽を下に押しつけているそうです。

第一立坑は高さ70mの大迫力で、一番上の壁沿いに組まれた足場から下を見ることができます。私は高いところが苦手でして、非常に怖かったです。足が進まないし、変な汗が止まりません。
怖すぎて壁際にずっとしがみついていたため、写真を撮る余裕がありませんでした。一緒に行ったみなさまが高いところが平気なようで、写真をバシバシ撮っていましたので、一枚恵んでもらいました。

高いところ(立坑)はもう懲り懲りですが……、今回参加したコースとは別の見学コース(排水ポンプ室に入れる)もあるらしいので、別コースにもぜひ行ってみたいですね。
コメント一覧
- コメントはありません。
この記事にコメントする
2019年7月18日
C言語とCPUアーキテクチャと除算命令
目次: C言語とlibc
今まであまりCPUアーキテクチャの違いを感じたことはありませんが、除算命令を触っていたところ、アーキテクチャによってかなり動きが違っていて面白かったので、メモしておきます。
プログラムは下記のとおりです。
-1による除算
#include <stdio.h>
#include <limits.h>
void f(int a, int b)
{
printf("mul:%08x * %08x = %08x\n", a, b, a * b);
printf("div:%08x / %08 = %08x\n", a, b, a / b);
}
int main(int argc, char *argv[])
{
f(INT_MAX, -1);
f(INT_MIN + 1, -1);
f(INT_MIN, -1); //乗算、除算の動作は未定義
f(INT_MAX, 0); //除算の動作は未定義
}
初めに断っておくと、コメントを打った箇所については、C言語上の仕様上、動作が未定義です。つまり、どんなことでも起こり得ます。不定な結果が返ることもあるし、プログラムが停止することだってあります。
未定義動作も色々
このプログラムをx86 (x86_64, Ryzen 7 2700), ARM (AArch64, Cortex A53), RISC-V (RV64GC, SiFive FU540) のLinux上でそれぞれ実行してみます。
各アーキテクチャでの実行結果
#### x86_64 ####
mul:7fffffff * ffffffff = 80000001
div:7fffffff / ffffffff = 80000001
mul:80000001 * ffffffff = 7fffffff
div:80000001 / ffffffff = 7fffffff
mul:80000000 * ffffffff = 80000000
Floating point exception
#### AArch64 ####
mul:7fffffff * ffffffff = 80000001
div:7fffffff / ffffffff = 80000001
mul:80000001 * ffffffff = 7fffffff
div:80000001 / ffffffff = 7fffffff
mul:80000000 * ffffffff = 80000000
div:80000000 / ffffffff = 80000000
mul:7fffffff * 00000000 = 00000000
div:7fffffff / 00000000 = 00000000
#### RV64GC ####
mul:7fffffff * ffffffff = 80000001
div:7fffffff / ffffffff = 80000001
mul:80000001 * ffffffff = 7fffffff
div:80000001 / ffffffff = 7fffffff
mul:80000000 * ffffffff = 80000000
div:80000000 / ffffffff = 80000000
mul:7fffffff * 00000000 = 00000000
div:7fffffff / 00000000 = ffffffff
当然ながら、動作が定義されている演算は、どのアーキテクチャでも同じ結果です。当たり前ですね。
- INT_MAX * (-1) = INT_MIN + 1
- INT_MAX / (-1) = INT_MIN + 1
- (INT_MIN + 1) * (-1) = INT_MAX
- (INT_MIN + 1) / (-1) = INT_MAX
- INT_MAX * 0 = 0
一方で動作が未定義の演算は、かなり挙動が変わります。
- INT_MIN * (-1) = INT_MIN
- INT_MIN / (-1) = クラッシュ (x86_64), INT_MIN (AArch64, RV64GC)
- INT_MAX / 0 = クラッシュ (x86_64), 0 (AArch64), -1 (RV64GC)
個性が出ますね。
x86の除算命令の奇妙な仕様
先ほどの例でx86上でINT_MIN / (-1) の除算がクラッシュする原因はidiv命令の仕様です。
Intelの命令仕様書(Intel Architectures Software Developer Manual: Vol 2)のIDIV - Signed Divideのページを見ると、保護モード例外 #DEが発生する条件として、
- ソース・オペランド(除数)が0である場合
- デスティネーションに対して符号付きの結果(商)が大きすぎる場合
この2条件が挙げられています。INT_MIN / (-1) は結果が32bitで表現できないため、後者に引っ掛かるわけです。
異常な演算に対して例外を発生させる設計思想なら分かりますが、乗算命令は異常な結果でも素通しなのに、除算命令は異常な結果だと例外発生します。片手落ちの不思議な仕様です。変なの……。
コメント一覧
- hdkさん(2019/07/20 00:23)
x86の除算例外は8086/8088の頃からありました。乗算については、8ビット同士を掛けて16ビットを出すか、16ビット同士を掛けて32ビットを出すかしかなかったので、異常な結果というのがそもそもなかったんですよね。(下位ビットだけ使うのはCコンパイラーの勝手なので。) 今はIMUL命令のオペランドが増えて同一ビット幅の答えを返す命令もありますが、例外がないのは名残か、あるいは、同じく例外がないシフトと足し算の命令の代わりに使われることを意図したかでしょうか。想像ですが。 - すずきさん(2019/07/20 10:56)
MUL については、結果が倍のビット幅になっていたからという理屈もわかるんですが、加算、減算はオーバーフローしたらOFをセットするだけなのに、「除算だけ」オーバーフローで例外を発生させるのは、変な仕様です。。。 - すずきさん(2019/07/20 11:02)
OFをセットして例外を出したければINTOでオーバーフロー例外(#OF)を発生させるのがx86の仕様に思えるのですが、除算だけ特別というかわざわざ除算例外(#DE)なんて用意しているのも不思議です……。 - hdkさん(2019/07/24 07:25)
加算減算は符号のありなしどちらも命令が同じですから、オーバーフローで即例外ってわけにはいかないですね。まぁ確かに除算も不正な解を出してフラグを立てる実装もありそうですが、除算回路が止まっちゃうのかなーという気も... ちなみにAAM命令でも0を指定すれば#DE発生させられます。 - すずきさん(2019/07/24 22:22)
AAM(ASCII Adjust AX After Multiply)って使ったことないですが、乗算系の命令でも #DE 発生するんですね。
一貫性が無い感じが x86 らしいといえばらしいです。。。 - hdkさん(2019/07/25 00:02)
あっ、AAMはマニュアルのオペレーションを見ていただくとわかりますが中身は除算命令ですので、乗算系とは言えない気がします。DIV命令と違って8ビットを8ビットで割って8ビットの商と余りを出すので(全部符号なし整数)、0除算以外に例外が発生する条件はありません。
この記事にコメントする
2019年7月21日
RISC-Vの命令
目次: RISC-V
最近、何かと関わっているRISC-Vの理解のため、エミュレータを書いてみています。先日購入したHiFive Unleashed(2019年5月26日の日記参照)の1st ROMと2nd ROMを拝借して、Linuxがブートする辺りまで作るのが当面の目標です。
スクラッチから作ると辛いので、ARMv5のエミュレータememu(GitHubへのリンク)をベースにして改造して作っています。まがりなりにもARMv5が動いているんだから、RISC-Vも楽勝だろうと思いきや、世の中そんなに甘くありませんでした。
最初にコケたのはUnalignedな命令ロードです。RISC-VのC拡張をサポートする場合32bit境界ではないアドレスから、32bit命令をロードする場合があります。ARMv5ではUnalignedアクセス例外が発生します。
RISC-Vの命令エンコード
まだ完成していないので、現時点での感想ですが、RISC-Vの命令エンコードは比較的わかりやすい気がします。ただ、ブランチ命令のオフセットは、下記のような並びになっていて、不思議な配置です。

今まで見た中で一番見づらいものは、C拡張命令のバイナリです、これは異様に見づらいです。しかしC拡張の目的(命令長を削るため16bit長に無理して詰めている)からすると、仕方ないでしょうね。
コメント一覧
- コメントはありません。
この記事にコメントする
2019年7月28日
強いオセロ
どうやっても圧勝してしまう「最弱オセロ」(リンク)が話題ですが、実はその横に「強いオセロ」(リンク)もあります。URLから推測するにこちらの方が先に作られたように見えます。
名前に偽りはなく、ものすごく強いです。私のような素人の実力ですと50石(ほぼ真っ白)〜64石(全て白)で完敗します。終盤に一気にひっくり返され、全く勝てません。
まともにやっても全く勝てなかったので、どんな手でも良いから、1度でも勝てないだろうか?と試行錯誤するうちに、ちょっとしたクセが見えてきました。このAIは「終盤の大逆転」を重視していて、序盤〜中盤は石数が不利でも無視する傾向があります。
このクセを逆手に取り、中盤戦でとにかくゴリ押しして、白を全滅させる作戦を取ると、ごくたまに勝てることがあります。下記はその例です。
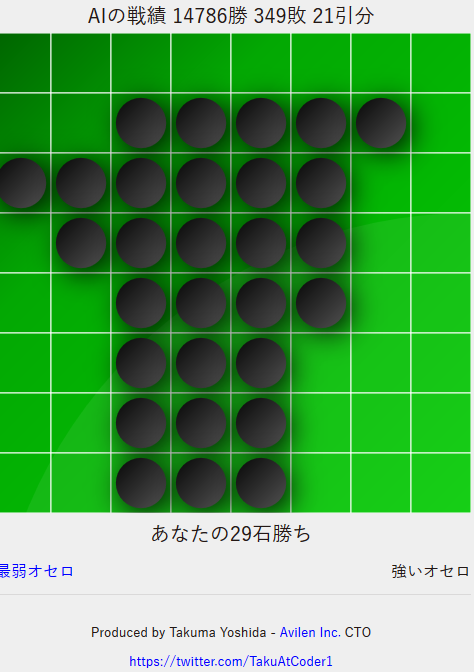
中盤で押し切れなければ負けです。20〜30局やりましたが、これ以外の勝ち方はできませんでした……。
コメント一覧
- コメントはありません。
この記事にコメントする
2019年7月29日
RISC-V原典
RISC-V原典という本も買って読んでいます。どちらかというと頭から読む本ではなく、辞書的な本です。命令一覧の章はとても便利ですね。
RISC-V原典では「過去のアーキテクチャが患ったインクリメンタリズム」と他のアーキテクチャの複雑さを評していましたが、RISC-Vは出来たばかりなので「今」シンプルなのは当然だよね……などと思ったりしました。
RISC-Vと昔のARM
RISC-Vは命令セットの独自拡張を許しているため、同じRISC-V CPUを名乗っていても「A社CPUとB社CPUでは、同じバイナリが実行できない」ことがありえます。
ARMやx86も互換性のないCPUは存在しますが、共通の命令セットが大きいためあまり問題にはなりません。一方RISC-Vは共通命令セットが小さい(RV32I、MMUなしのマイコンレベル)ので、非互換性で問題が起きそうですね。ARMでいうとCortex-A系とCortex-M系を混ぜて売るようなもので、混乱を招きそうです……。
このタイプの命令拡張方式で私が思い出したのはARMです。ARMも昔はARMv5TEJのように、対応する拡張命令をアルファベットで追記する、似たような方式を採用していましたが、ARMv6で拡張命令に全て対応したため、拡張命令方式は消滅しました。
未来予想
私の予想としては、スマートフォン、デジタル家電、PCのような、比較的高性能な分野にはRV64GC(G = IMAFD、multiple, atomic, float, double)が共通命令セットになり、マイコン系にはRV32IかIMくらいが共通命令セットになる、辺りが落としどころかなと思います。
RISC-Vも「インクリメンタリズム」に陥る未来は避けられず、拡張に次ぐ拡張でゴチャゴチャになる未来を迎えると思いますが、20年後、
- RISC-Vがそもそも使われているか
- RISC-Vは今と同じことを言えるくらいシンプルを維持できるか
- RISC-Vが別のアーキから同じ欠点を指摘されていないか(歴史は繰り返す…)
期待が大きいだけに、将来的にどうなるか、楽しみです。
コメント一覧
- コメントはありません。
この記事にコメントする
2019年7月30日
ヘッドフォンの謎のノイズ
オーディオは専門ではないし、神の耳も持っていないので、細かい音質うんぬんは全くわからないし、高級○○ケーブルなどはオカルトの一種とすら思っていますが……。
音質で唯一体験したことを思い出したので、メモしておきます。
以前はテレビのファーム開発をしていたため、職場ではテストのために少し良い(1万円〜2万円レベルの)ヘッドホン(SHURE SRH440-A)を使っていました。
何も鳴らしていないのに、ヘッドホンからたまにブーン……という微かなノイズと、バリ、バリ!という大きめのノイズが聞こえていました。
スマホとヘッドフォン
最初、評価ボードか機材の故障を疑っていたのですが、なんと原因は自分のスマホでした。
前者のブーン……ノイズは、ヘッドホンのケーブルをくるくると丸めて束ねた上に、スマホを置いていたため、スマホの電波を拾ってノイズになっていたようです。
たまにしか鳴らないのは、パケット通信のときしか強く電波を発しないからですかね?スマホを机の上に置かないようにしたらノイズは聞こえなくなりました。
家の安いヘッドホンで同じことをしても、ノイズは聞こえなかったので、感度の良いヘッドホンじゃないと拾わない(?)のかもしれません。
後者のバリバリ!ノイズは、ヘッドホンアンプの上にスマホを置きっぱにしたときに鳴っていました。ノイズを増幅するのか、かなり目立つバリバリ音が聞こえていました。
これもスマホとアンプを遠ざけて置くことで、ノイズが消えました。
謎が解ければ何てこと無い原因でしたけど、最初はわからなくて、このヘッドフォン壊れているんだろうか?不良品かしら……?とか思っていました。冤罪でした、ごめんねヘッドホンさん。
タチの悪い内蔵音源
音質でもう一つ思い出したのが、先代ノートPC(ThinkPad Edge E420)のアナログオーディオ出力は、常にシューシューというノイズが聞こえていたことです。
2010年は遥かに過ぎて、こんなにノイズが鳴るオーディオがあるはずない、聞き間違いだろうと思いきや、安物のオシロで見てもすぐわかるくらいノイズが載っていてショックでした。Conexantさん勘弁してよ……と思いました。
測定結果は、以前の日記に書いています(2014年10月18日の日記参照)。あれからもう五年も経ったのか。早いものだ。
メモ: 技術系?の話はFacebookから転記しておくことにした。リンクなどを追記。
コメント一覧
- コメントはありません。
この記事にコメントする
こんてんつ
wiki Linux JM Java API過去の日記
2002年 2003年 2004年 2005年 2006年 2007年 2008年 2009年 2010年 2011年 2012年 2013年 2014年 2015年 2016年 2017年 2018年 2019年 2020年 2021年 2022年 2023年 2024年 2025年 過去日記についてその他の情報
アクセス統計 サーバ一覧 サイトの情報