2020年2月5日
Zephyr OSで遊ぼう その4 - 独自のSoC定義
目次: Zephyr
Hogeボードの定義を一通り実装しました。HogeボードのSoCはqemu_riscv32と同じSiFive FE310にしたことを覚えているでしょうか?Zephyrの移植に興味のある方からすると「ボード名を変えただけで、qemu_riscv32のコピーでは?」と感じるはずです。そんな悲しみの声にお答えすべく、次はSoCの変更を行います。
今回、ターゲットとするSoCはQEMUのSpikeモードです。このモードは、特別なハードウェアが必要なく手軽、偶然にも現状のZephyrが対応していない、簡単なドライバの実装が1つだけ必要、など学習にピッタリです。
Spikeはシミュレータのみで、物理的に存在するSoCではありません。ですが名前がないと説明しづらいので、以降の説明ではSpike SoCと呼びます。
RISC-V SoCディレクトリの構造とSpike SoCの定義場所
将来複雑になるかもしれませんが、今は簡単な構造です。zephyr/soc/riscvの下にSoCが定義されており、litex-vexriscv(LiteX VexRiscv), openisa_rv32m1(OpenISA RV32M1), riscv-privilege(RISC-V Priviledged Architecture対応SoC)の3つのディレクトリが存在しています。このうちriscv-privilegeは、さらに内部にいくつかのSoCの定義を抱えています。
SpikeはRISC-V Priviledgedに対応しているので、今回はriscv-privilegeシリーズの1つとして、新たなSoCを定義すると良さそうです。
ボードの定義を改造
Hogeボードの定義を見直してみると、Kconfig.boardに "depends on SOC_RISCV_SIFIVE_FREEDOM" の記述があり、hoge.dtsに #include <riscv32-fe310.dtsi> の記述があります。とりあえずこれを下記のように変更します。
Kconfig.boardとhoge.dtsの変更点
diff --git a/boards/riscv/hoge/Kconfig.board b/boards/riscv/hoge/Kconfig.board
index 7ece0d6dee..c90614a391 100644
--- a/boards/riscv/hoge/Kconfig.board
+++ b/boards/riscv/hoge/Kconfig.board
@@ -2,4 +2,4 @@
config BOARD_HOGE
bool "Hoge target"
- depends on SOC_RISCV_SIFIVE_FREEDOM
+ depends on SOC_RISCV_SPIKE
diff --git a/boards/riscv/hoge/hoge.dts b/boards/riscv/hoge/hoge.dts
index 21678f49ea..ee0c6589c4 100644
--- a/boards/riscv/hoge/hoge.dts
+++ b/boards/riscv/hoge/hoge.dts
@@ -2,7 +2,7 @@
/dts-v1/;
-#include <riscv32-fe310.dtsi>
+#include <riscv32-spike.dtsi>
/ {
model = "Hoge";
この状態でcmakeをやり直します。念のためbuildディレクトリのファイルを全て削除してから、実行したほうが良いでしょう。
Kconfig.boardとhoge.dtsを変更してcmake
$ cmake -G Ninja -DBOARD=hoge ../samples/hello_world/
-- Zephyr version: 2.1.99
-- Found PythonInterp: /usr/bin/python3 (found suitable version "3.7.6", minimum required is "3.6")
-- Selected BOARD hoge
-- Loading zephyr/boards/riscv/hoge/hoge.dts as base
In file included from <command-line>:
zephyr/boards/riscv/hoge/hoge.dts:5:10: fatal error: riscv32-spike.dtsi: No such file or directory
#include <riscv32-spike.dtsi>
^~~~~~~~~~~~~~~~~~~~
compilation terminated.
CMake Error at zephyr/cmake/dts.cmake:140 (message):
command failed with return code: 1
Call Stack (most recent call first):
zephyr/cmake/app/boilerplate.cmake:460 (include)
CMakeLists.txt:5 (include)
-- Configuring incomplete, errors occurred!
エラーをみるにriscv32-spike.dtsiがないと言って怒られているようですから、追加しましょう。
SoCのデバイスツリー
Zephyrのデバイスツリーはzephyr/dts以下にあります。今回はRISC-V一派のSoCを追加しますから、zephyr/dts/riscvの下にriscv32-spike.dtsiを作りましょう。
riscv32-spike.dtsi
/* SPDX-License-Identifier: Apache-2.0 */
/ {
#address-cells = <1>;
#size-cells = <1>;
compatible = "spike-dev";
model = "spike";
soc {
#address-cells = <1>;
#size-cells = <1>;
compatible = "spike-soc", "simple-bus";
ranges;
clint: clint@2000000 {
compatible = "riscv,clint0";
reg = <0x02000000 0x10000>;
reg-names = "control";
};
mem: mem@80000000 {
compatible = "spike,mem";
reg = <0x80000000 0x4000>;
reg-names = "mem";
};
uart0: serial {
compatible = "spike,uart-spike";
label = "uart_0";
};
};
};
最低限のデバイスだけ定義しています。
- clint
- 割り込みコントローラ(Core Local Interruptor)です。タイマーのレジスタ(mtime, mtimecmp)を持っているコアです。
- mem
- SRAM領域です。QEMUは数百MBくらいメモリ領域があった気がしますが、そんなに要らないので16KBにしています。
- uart0
- シリアルデバイスです。実はこの名前は適切ではありません。Spikeは特殊なゲスト、ホスト間の通信により文字出力を実現していて、UARTハードウェアを模している訳ではないからです。レジスタ領域の定義が不要なのも、ハードウェアアクセスではないからです。
このファイルを加えてもまだcmakeに怒られます。Spike SoC用のデバイスツリーに出てこないノード(gpio, spiなど)を参照している箇所があるためです。ボード側の定義からばっさり削除します。
hoge.dtsのさらなる変更
diff --git a/boards/riscv/hoge/hoge.dts b/boards/riscv/hoge/hoge.dts
index 21678f49ea..e572d5a769 100644
--- a/boards/riscv/hoge/hoge.dts
+++ b/boards/riscv/hoge/hoge.dts
@@ -11,34 +11,10 @@
chosen {
zephyr,console = &uart0;
zephyr,shell-uart = &uart0;
- zephyr,sram = &dtim;
- zephyr,flash = &flash0;
+ zephyr,sram = &mem;
};
};
-&gpio0 {
- status = "okay";
-};
-
&uart0 {
status = "okay";
- current-speed = <115200>;
- clock-frequency = <16000000>;
-};
-
-&spi0 {
- status = "okay";
-
- #address-cells = <1>;
- #size-cells = <0>;
- reg = <0x10014000 0x1000 0x20400000 0xc00000>;
- flash0: flash@0 {
- compatible = "issi,is25lp128", "jedec,spi-nor";
- size = <134217728>;
- label = "FLASH0";
- jedec-id = [96 60 18];
- reg = <0>;
- // Dummy entry
- spi-max-frequency = <0>;
- };
};
これでもまだcmakeは通過できません。長くなってきましたので、続きはまた今度。
コメント一覧
- コメントはありません。
 この記事にコメントする
この記事にコメントする
2020年2月4日
Zephyr OSで遊ぼう その3 - ボードのデフォルトコンフィグ
目次: Zephyr
前回はデフォルトコンフィグがx86になっていたり、ドライバを有効にしないとリンクエラーになったり、おかしなことが起きていました。対策として手動でコンフィグを変えまくりましたが、本来は必要ありません。Zephyrのボード定義では、ボードごとにデフォルトコンフィグを持つことができるからです。
他のボード(zephyr/boards/riscv/qemu_riscv32/qemu_riscv32_defconfigなど)を見ると、ボード名_defconfigというファイルの中にCONFIG_ABCD=yという文がたくさんあります。このファイルに追加すると反映されそうです。
(2/19訂正: CONFIG_SYS_CLOCK_TICKS_PER_SEC=100を追加しないとタイマー割り込みが入りすぎて動かなくなるため、修正しました)
ボードのdefconfig: zephyr/boards/riscv/hoge/hoge_defconfig
# SPDX-License-Identifier: Apache-2.0
CONFIG_RISCV=y
CONFIG_SOC_SERIES_RISCV_SIFIVE_FREEDOM=y
CONFIG_SOC_RISCV_SIFIVE_FREEDOM=y
CONFIG_BOARD_HOGE=y
CONFIG_CONSOLE=y
CONFIG_PRINTK=y
CONFIG_SERIAL=y
CONFIG_UART_SIFIVE=y
CONFIG_UART_SIFIVE_PORT_0=y
CONFIG_UART_CONSOLE=y
CONFIG_PLIC=y
CONFIG_PINMUX=y
CONFIG_PINMUX_SIFIVE=y
CONFIG_RISCV_MACHINE_TIMER=y
CONFIG_GPIO=y
CONFIG_GPIO_SIFIVE=y
CONFIG_SYS_CLOCK_TICKS_PER_SEC=100
CONFIG_SYS_CLOCK_HW_CYCLES_PER_SEC=10000000
CONFIG_BOARD_HOGEを除けば、ほぼqemu_riscv32_defconfigと同じです。
ボードのdefconfigを追加した後のcmakeとビルド
$ cd build
$ rm -r *
$ cmake -G Ninja -DBOARD=hoge ../samples/hello_world/
-- Zephyr version: 2.1.99
-- Found PythonInterp: /usr/bin/python3 (found suitable version "3.7.6", minimum required is "3.6")
-- Selected BOARD hoge
-- Loading zephyr/boards/riscv/hoge/hoge.dts as base
Devicetree header saved to 'zephyr/build/zephyr/include/generated/devicetree_unfixed.h'
Parsing zephyr/Kconfig
Loaded configuration 'zephyr/boards/riscv/hoge/hoge_defconfig'
Merged configuration 'zephyr/samples/hello_world/prj.conf'
Configuration saved to 'zephyr/build/zephyr/.config'
Kconfig header saved to 'zephyr/build/zephyr/include/generated/autoconf.h'
-- The C compiler identification is GNU 8.3.0
-- The CXX compiler identification is GNU 8.3.0
-- The ASM compiler identification is GNU
-- Found assembler: /home/katsuhiro/x-tools/riscv64-zephyr-elf/bin/riscv64-zephyr-elf-gcc
-- Cache files will be written to: /home/katsuhiro/.cache/zephyr
-- Configuring done
-- Generating done
-- Build files have been written to: zephyr/build
$ ninja
[0/1] Re-running CMake...
-- Zephyr version: 2.1.99
-- Selected BOARD hoge
-- Loading zephyr/boards/riscv/hoge/hoge.dts as base
Devicetree header saved to 'zephyr/build/zephyr/include/generated/devicetree_unfixed.h'
Parsing zephyr/Kconfig
Loaded configuration 'zephyr/build/zephyr/.config'
No change to configuration in 'zephyr/build/zephyr/.config'
No change to Kconfig header in 'zephyr/build/zephyr/include/generated/autoconf.h'
-- Cache files will be written to: /home/katsuhiro/.cache/zephyr
-- Configuring done
-- Generating done
-- Build files have been written to: zephyr/build
[97/102] Linking C executable zephyr/zephyr_prebuilt.elf
Memory region Used Size Region Size %age Used
ROM: 12761 B 12 MB 0.10%
RAM: 4048 B 16 KB 24.71%
IDT_LIST: 553 B 2 KB 27.00%
[102/102] Linking C executable zephyr/zephyr.elf
この状態でcmakeから実行すると、ビルド時に文句を言われなくなります。buildディレクトリには、以前cmakeを実行したときの設定ファイルが残っていますので、一度全て削除してから再度cmakeを実行した方が良いでしょう。特に -DBOARDを変更するときは削除したほうが良いです(cmakeにも同様の内容を注意されるはず)。
次回以降は、独自のSoCの追加に挑もうと思います。
補足: デバイスツリーとDT_INST_ マクロの関係
前回は説明を省きましたが、デバイスツリーからDT_INST_ なんとかマクロへの変換ルールは下記にあります。
DT_INST_ マクロを生成している箇所
# zephyr/cmake/dts.cmake
...
#
# Run gen_defines.py to create a .conf file and a header file
#
set(CMD_NEW_EXTRACT ${PYTHON_EXECUTABLE} ${ZEPHYR_BASE}/scripts/dts/gen_defines.py
--dts ${BOARD}.dts.pre.tmp
--bindings-dirs ${DTS_ROOT_BINDINGS}
--conf-out ${DEVICETREE_CONF}
--header-out ${DEVICETREE_UNFIXED_H}
--dts-out ${PROJECT_BINARY_DIR}/zephyr.dts # As a debugging aid
)
...
# zephyr/scripts/dts/gen_defines.py
def main():
global conf_file
global header_file
global flash_area_num
...
for node in sorted(edt.nodes, key=lambda node: node.dep_ordinal):
write_node_comment(node)
# Flash partition nodes are handled as a special case. It
# would be nicer if we had bindings that would let us
# avoid that, but this will do for now.
if node.name.startswith("partition@"):
write_flash_partition(node, flash_area_num)
flash_area_num += 1
if node.enabled and node.matching_compat:
write_regs(node)
write_irqs(node)
write_props(node)
write_clocks(node)
write_spi_dev(node)
write_bus(node)
write_existence_flags(node)
...
def write_existence_flags(node):
# Generate #defines of the form
#
# #define DT_INST_<instance no.>_<compatible string> 1
#
# for enabled nodes. These are flags for which devices exist.
for compat in node.compats:
instance_no = node.edt.compat2enabled[compat].index(node)
out(f"INST_{instance_no}_{str2ident(compat)}", 1)
...
def str2ident(s):
# Converts 's' to a form suitable for (part of) an identifier
return s.replace("-", "_") \
.replace(",", "_") \
.replace("@", "_") \
.replace("/", "_") \
.replace(".", "_") \
.replace("+", "PLUS") \
.upper()
基本的にノードのcompatibleがそのまま使われますが、C言語のマクロ名として使用できない文字はアンダースコアに置換されます。compatibleは小文字で書くことが多いですが、マクロ名は大文字に変換しています。
コメント一覧
- コメントはありません。
この記事にコメントする
2020年2月3日
Zephyr OSで遊ぼう その2 - ボードを追加してビルド
目次: Zephyr
前回ninjaを実行したときに嫌というほどエラーが出ました。エラーを追う前に、コンフィグがあっているかチェックしたいと思います。
ZephyrはLinux Kernelと似たコンフィグのシステム(Kconfig)を持っています。使い方もLinuxと似ており、ninja menuconfigとすると、ケバケバしい色(私の環境だと真っ白+黄色になる……)の画面が表示されます。
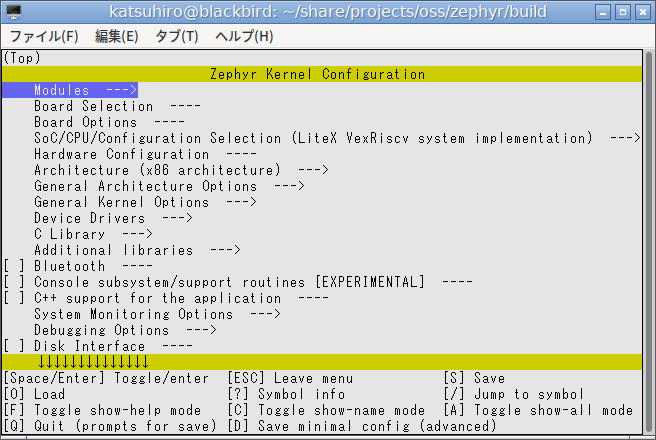
なぜかArchitectureがx86となっていたり、SoCがLiteXになっていたり、色々おかしいです。なぜこうなってしまったかは後にして、手当たり次第でそれらしい値に直すと、Board Selectionに今回追加したHoge targetが出現します。
menuconfigで手修正する箇所
$ ninja menuconfig Architecture (x86 architecture) ---> ( ) RISCV architectureを選択 SoC/CPU/Configuration Selection (LiteX VexRiscv system implementation) ---> ( ) SiFive Freedom SOC implementationを選択
コンフィグがそれらしくなったらninjaでビルドします。
menuconfigで手修正後のビルド
$ ninja
zephyr/samples/hello_world/src/main.c:12:30: error: 'CONFIG_BOARD' undeclared (first use in this function); did you mean 'CONFIG_ARCH'?
printk("Hello World! %s\n", CONFIG_BOARD);
^~~~~~~~~~~~
CONFIG_ARCH
...
In file included from ../include/devicetree.h:12,
from ../soc/riscv/riscv-privilege/sifive-freedom/soc.h:15,
from ../include/arch/riscv/arch.h:25,
from ../include/arch/cpu.h:23,
from ../include/kernel_includes.h:34,
from ../include/kernel.h:17,
from zephyr/drivers/interrupt_controller/intc_plic.c:13:
zephyr/drivers/interrupt_controller/intc_plic.c: In function 'riscv_plic_irq_enable':
zephyr/include/generated/devicetree_fixups.h:8:25: error: 'DT_INST_0_SIFIVE_PLIC_1_0_0_IRQ_EN_BASE_ADDRESS' undeclared (first use in this function)
#define DT_PLIC_IRQ_EN DT_INST_0_SIFIVE_PLIC_1_0_0_IRQ_EN_BASE_ADDRESS
^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
...
先程よりはマシになりましたが、まだエラーが山のように出ます。エラーの種類を大別するとCONFIG_BOARDの定義がない、DT_INST_ なんちゃらの定義がない、に分けられます。
最初のCONFIG_BOARDについては、いかにもボード側で定義しなければならなさそうな名前です。おなじみ他のボードを参照(boards/riscv/qemu_riscv32/Kconfig.defconfigなど)すると、Kconfig.boardで定義したconfig BOARD_HOGEが定義されているときに限り、CONFIG_BOARDにボード名のデフォルト値を設定していました。
つまり、このように書けば良いみたいです。
Kconfig.defconfig
# SPDX-License-Identifier: Apache-2.0
if BOARD_HOGE
config BOARD
default "hoge"
endif
それ以外のDT_INST_ なんちゃらの定義については、少し複雑です。
Zephyrのデバイスツリーの扱い
Linuxではデバイスツリーファイル(*.dts)をデバイスツリーコンパイラdtcでコンパイルして、Flattened Device Tree(fdt)という形式のバイナリにします。fdtはカーネル内部に組み込んだり、ブートローダが起動時にカーネルに渡すなどして利用されます。
しかしZephyrはそもそもdtcを使わず、Pythonで処理します。デバイスツリーを書き間違えるとPythonスクリプトが怒ってくるのですが、これが理由みたいです。なんだと?と思う方はZephyrのドキュメント(Devicetree - Zephyr Project Documentation)をご参照ください。下記に引用します。
Note: In addition to the Python code above, the standard dtc DTS compiler is also run on the devicetree. This is just to catch any errors or warnings it generates. The output is unused.
ドキュメントのGenerated macrosの章を見ると、デバイスツリーからDT_INST_ なんちゃら、というマクロを生成する、という説明があり、ビルドエラーの原因となったマクロの仲間のようです。
デバイスツリーを足そう
推測するにデバイスツリーを何も定義していないことが、DT_INST_ なんちゃらマクロが存在しないことの原因ではないでしょうか?他のボード(boards/riscv/qemu_riscv32/qemu_riscv32.dtsなど)がデバイスツリーをどうしているか、見ながら真似してみます。
hoge.dts
/* SPDX-License-Identifier: Apache-2.0 */
/dts-v1/;
#include <riscv32-fe310.dtsi>
/ {
model = "Hoge Board";
compatible = "hoge,hoge";
chosen {
zephyr,console = &uart0;
zephyr,shell-uart = &uart0;
zephyr,sram = &dtim;
zephyr,flash = &flash0;
};
};
&gpio0 {
status = "okay";
};
&uart0 {
status = "okay";
current-speed = <115200>;
clock-frequency = <16000000>;
};
&spi0 {
status = "okay";
#address-cells = <1>;
#size-cells = <0>;
reg = <0x10014000 0x1000 0x20400000 0xc00000>;
flash0: flash@0 {
compatible = "issi,is25lp128", "jedec,spi-nor";
size = <134217728>;
label = "FLASH0";
jedec-id = [96 60 18];
reg = <0>;
// Dummy entry
spi-max-frequency = <0>;
};
};
ほぼ全てコピーしただけです。ビルドしてみると、最後の方まで行きますが、いくつかシンボルがないと言われます。ログはフルパスが出ていて鬱陶しいので意味が残る程度に削っています。
デバイスツリー定義後のビルドエラー
$ ninja ... riscv64-zephyr-elf/bin/ld: zephyr/arch/arch/riscv/core/libarch__riscv__core.a(isr.S.obj): in function `.L0 ': zephyr/arch/riscv/core/isr.S:244: undefined reference to `_sw_isr_table' riscv64-zephyr-elf/bin/ld: zephyr/kernel/libkernel.a(sched.c.obj): in function `z_reset_time_slice': zephyr/kernel/sched.c:276: undefined reference to `z_clock_elapsed' riscv64-zephyr-elf/bin/ld: zephyr/kernel/libkernel.a(timeout.c.obj): in function `elapsed': zephyr/kernel/timeout.c:69: undefined reference to `z_clock_elapsed' collect2: error: ld returned 1 exit status % ninja: build stopped: subcommand failed.
これらのシンボルはドライバが提供するもののようですので、コンフィグでそれらしきものをONにしていきます。
コンフィグ追加
General Architecture Options --->
Interrupt Configuration --->
[ ] Use generated IRQ tablesを選択
General Kernel Options --->
[ ] Execute in place
Device Drivers --->
[ ] Serial Drivers ----
[ ] Enable UART Interrupt supportを選択
[ ] SiFive Freedom serial driver (NEW) ----
[ ] Enable SIFIVE Port 0 (NEW) ---- を選択
[ ] Console drivers ---
[ ] Use UART for console (NEW) を選択
Timer Drivers --->
[ ] RISCV Machine Timerを選択
[ ] GPIO Drivers ----
[ ] SiFive Freedom Processor GPIO driver (NEW) ---- を選択
[ ] Enable board pinmux driver ----
[ ] SiFive Freedom SOC pinmux driver (NEW) ----
このように全て手動で設定する必要はない(後々不要となる)ので、あまり詳しくなる必要はないですが、
- SiFive関連
- SiFiveのSoCなのでコンフィグを片っ端からONにしています
- Use generated IRQ tables
- _sw_isr_tableシンボルの定義に関わっています
- Execute in Place(XIP)
- ONにしないと、ビルドしたときにRAMサイズから溢れているというエラーで怒られます
- RISCV Machine Timer
- z_clock_elapsedシンボルの定義に関わっています
コンフィグがそれらしくなったらninjaでビルドして、実行します。
コンフィグ追加後、ビルド&実行
$ ninja
...
Memory region Used Size Region Size %age Used
ROM: 13165 B 12 MB 0.10%
RAM: 3808 B 16 KB 23.24%
IDT_LIST: 569 B 2 KB 27.78%
[98/98] Linking C executable zephyr/zephyr.elf
$ /usr/bin/qemu-system-riscv32 -nographic -machine sifive_e -net none -chardev stdio,id=con,mux=on -serial chardev:con -mon chardev=con,mode=readline -kernel /home/katsuhiro/share/projects/oss/zephyr/build/zephyr/zephyr.elf
*** Booting Zephyr OS build zephyr-v2.1.0-1471-g7e7a4426d835 ***
Hello World! hoge
実行できました。Hello Worldの後ろがボード名(CONFIG_BOARD)です。無事、アプリがhogeボード上で動いたということですね。次回は面倒くさかった手動コンフィグの撲滅に挑みます。
コメント一覧
- コメントはありません。
この記事にコメントする
2020年2月2日
Zephyr OSで遊ぼう その1 - ボードを追加してcmake
目次: Zephyr
先日(2020年1月31日の日記参照)RISC-V 32bit版のZephyr OSが動作しました。気分を変えて、別のボードへの移植に挑戦してみたいと思います。
名前は何でも良いのですが、とりあえずhogeボードということにします。-DBOARD=hogeを指定してcmakeを実行すると、そんなものはないと怒られ、猛烈な勢いでヘルプメッセージが出るとともに、サポートされているボードの一覧が出てきます。
存在しないボードを指定したときの、ボード一覧
$ cmake -G Ninja -DBOARD=hoge ../samples/hello_world/
-- Zephyr version: 2.1.99
-- Found PythonInterp: /usr/bin/python3 (found suitable version "3.7.6", minimum required is "3.6")
-- Selected BOARD hoge
No board named 'hoge' found
see usage:
...
Supported Boards:
...
riscv:
hifive1
hifive1_revb
litex_vexriscv
m2gl025_miv
qemu_riscv32
qemu_riscv64
rv32m1_vega_ri5cy
rv32m1_vega_zero_riscy
x86:
acrn
gpmrb
minnowboard
qemu_x86_64
qemu_x86_coverage
qemu_x86
qemu_x86_nommu
up_squared
...
まず、この一覧にhogeボードを載せるのが第一段階です。ボードの一覧を調べているcmakeのスクリプトを見ます。
ボード一覧を調べている箇所
# zephyr/cmake/app/boilerplate.cmake
...
foreach(root ${BOARD_ROOT})
# NB: find_path will return immediately if the output variable is
# already set
find_path(BOARD_DIR
NAMES ${BOARD}_defconfig
PATHS ${root}/boards/*/*
NO_DEFAULT_PATH
)
if(BOARD_DIR AND NOT (${root} STREQUAL ${ZEPHYR_BASE}))
set(USING_OUT_OF_TREE_BOARD 1)
endif()
...
これで探しているように見えます。boards/*/* ディレクトリに「ボード名_defconfig」という名前のファイルがあれば良さそうです。足してからcmakeを再度、存在しないボード名(hoge2とかで良いです)で実行しましょう。
defconfigを足した後のボード一覧
$ mkdir boards/riscv/hoge
$ touch boards/riscv/hoge/hoge_defconfig
$ cmake -G Ninja -DBOARD=hoge2 ../samples/hello_world/
...
riscv:
hifive1
hifive1_revb
hoge ★hogeが出てきた★
litex_vexriscv
m2gl025_miv
qemu_riscv32
qemu_riscv64
rv32m1_vega_ri5cy
rv32m1_vega_zero_riscy
...
やりました。ボードの一覧にhogeが出ました。BOARD=hogeにしてcmakeを実行しましょう。
defconfigを足した後のcmake
$ cmake -G Ninja -DBOARD=hoge ../samples/hello_world/ -- Zephyr version: 2.1.99 -- Selected BOARD hoge Parsing zephyr/Kconfig zephyr/scripts/kconfig/kconfig.py: Kconfig.zephyr:26: 'zephyr/boards/riscv/hoge/Kconfig.defconfig' not found (in 'source "$(BOARD_DIR)/Kconfig.defconfig"'). Check that environment variables are set correctly (e.g. $srctree, which is set to 'zephyr'). Also note that unset environment variables expand to the empty string. CMake Error at zephyr/cmake/kconfig.cmake:214 (message): command failed with return code: 1 Call Stack (most recent call first): zephyr/cmake/app/boilerplate.cmake:461 (include) CMakeLists.txt:5 (include) -- Configuring incomplete, errors occurred!
まだ色々とエラーが出ています。エラーメッセージはKconfig.defconfigがないと言っています。このファイルを足すと、今度はKconfig.boardがないと言われますので、両方とも足します。
Kconfig.defconfig, Kconfig.boardを足した後のcmake
$ touch boards/riscv/hoge/Kconfig.defconfig $ touch boards/riscv/hoge/Kconfig.board $ cmake -G Ninja -DBOARD=hoge ../samples/hello_world/ -- Zephyr version: 2.1.99 -- Found PythonInterp: /usr/bin/python3 (found suitable version "3.7.6", minimum required is "3.6") -- Selected BOARD hoge Parsing zephyr/Kconfig Loaded configuration 'zephyr/boards/riscv/hoge/hoge_defconfig' Merged configuration 'zephyr/samples/hello_world/prj.conf' warning: <choice> (defined at boards/Kconfig:19) defined with type unknown error: Aborting due to non-whitelisted Kconfig warning 'warning: <choice> (defined at boards/Kconfig:19) defined with type unknown'. If this warning doesn't point to an actual problem, you can add it to the whitelist at the top of zephyr/scripts/kconfig/kconfig.py. CMake Error at zephyr/cmake/kconfig.cmake:214 (message): command failed with return code: 1 Call Stack (most recent call first): zephyr/cmake/app/boilerplate.cmake:461 (include) CMakeLists.txt:5 (include) -- Configuring incomplete, errors occurred!
今度はchoiceが無いと言っています。エラーを出しているのは下記のcmakeファイルです。
エラーを出しているkconfig.cmake
# zephyr/cmake/kconfig.cmake
execute_process(
COMMAND
${PYTHON_EXECUTABLE}
${ZEPHYR_BASE}/scripts/kconfig/kconfig.py
${input_configs_are_handwritten}
${KCONFIG_ROOT}
${DOTCONFIG}
${AUTOCONF_H}
${PARSED_KCONFIG_SOURCES_TXT}
${input_configs}
WORKING_DIRECTORY ${APPLICATION_SOURCE_DIR}
# The working directory is set to the app dir such that the user
# can use relative paths in CONF_FILE, e.g. CONF_FILE=nrf5.conf
RESULT_VARIABLE ret
)
if(NOT "${ret}" STREQUAL "0")
message(FATAL_ERROR "command failed with return code: ${ret}")
endif()
このままkconfig.pyを見ても良いですが、おそらく時間のムダです。親切なエラーメッセージが出ているからです。メッセージの言うとおりboards/Kconfigを見ます。
choiceのエラーの原因
# boards/Kconfig ... # Note: $BOARD_DIR might be a glob pattern choice prompt "Board Selection" source "$(BOARD_DIR)/Kconfig.board" ★このファイルが空★ endchoice
先ほど作成したKconfig.boardが空っぽだったため、choiceの選択肢が存在せず怒られているようです。書く内容については、別のボード(例えばzephyr/boards/riscv/qemu_riscv32/Kconfig.board)を参照すると良いと思います。今回はこんな内容にしました。
Kconfig.boardを書き換え
# SPDX-License-Identifier: Apache-2.0
config BOARD_HOGE
bool "Hoge target"
depends on SOC_RISCV_SIFIVE_FREEDOM
この定義だとSiFiveのFreedomが搭載されていることになりますが、depends onの先に手を出すには、SoCの定義を加えなければなりません。一度に紹介しても訳がわからないので、今回はボードに焦点を絞ります。
書き換えた後にもう一度cmakeを実行すると、成功します。
Kconfig.boardを書き換えた後にcmake実行
$ cmake -G Ninja -DBOARD=hoge ../samples/hello_world/
-- Zephyr version: 2.1.99
-- Found PythonInterp: /usr/bin/python3 (found suitable version "3.7.6", minimum required is "3.6")
-- Selected BOARD hoge
Parsing zephyr/Kconfig
Loaded configuration 'zephyr/boards/riscv/hoge/hoge_defconfig'
Merged configuration 'zephyr/samples/hello_world/prj.conf'
Configuration saved to 'zephyr/build/zephyr/.config'
-- The C compiler identification is GNU 8.3.0
-- The CXX compiler identification is GNU 8.3.0
-- The ASM compiler identification is GNU
-- Found assembler: /home/katsuhiro/x-tools/riscv64-zephyr-elf/bin/riscv64-zephyr-elf-gcc
-- Cache files will be written to: /home/katsuhiro/.cache/zephyr
-- Configuring done
-- Generating done
-- Build files have been written to: zephyr/build
$ ninja
[0/1] Re-running CMake...
-- Zephyr version: 2.1.99
-- Selected BOARD hoge
Parsing zephyr/Kconfig
Loaded configuration 'zephyr/build/zephyr/.config'
No change to 'zephyr/build/zephyr/.config'
-- Cache files will be written to: /home/katsuhiro/.cache/zephyr
-- Configuring done
-- Generating done
-- Build files have been written to: zephyr/build
[5/83] Building C object zephyr/CMakeFiles/offsets.dir/arch/riscv/core/offsets/offsets.c.obj
FAILED: zephyr/CMakeFiles/offsets.dir/arch/riscv/core/offsets/offsets.c.obj
ccache /home/katsuhiro/x-tools/riscv64-zephyr-elf/bin/riscv64-zephyr-elf-gcc -DBUILD_VERSION=zephyr-v2.1.0-1471-g7e7a4426d835 -DKERNEL -D_FORTIFY_SOURCE=2 -D__ZEPHYR__=1 -I../kernel/include -I../arch/riscv/include -I../include -Izephyr/include/generated -I../soc/riscv/litex-vexriscv -isystem ../lib/libc/minimal/include -isystem /home/katsuhiro/x-tools/riscv64-zephyr-elf/lib/gcc/riscv64-zephyr-elf/8.3.0/include -isystem /home/katsuhiro/x-tools/riscv64-zephyr-elf/lib/gcc/riscv64-zephyr-elf/8.3.0/include-fixed -Os -imacroszephyr/build/zephyr/include/generated/autoconf.h -ffreestanding -fno-common -g -mabi=ilp32 -march=rv32ima -imacroszephyr/include/toolchain/zephyr_stdint.h -Wall -Wformat -Wformat-security -Wno-format-zero-length -Wno-main -Wno-pointer-sign -Wpointer-arith -Wno-unused-but-set-variable -Werror=implicit-int -fno-asynchronous-unwind-tables -fno-pie -fno-pic -fno-strict-overflow -fno-reorder-functions -fno-defer-pop -fmacro-prefix-map=zephyr/samples/hello_world=CMAKE_SOURCE_DIR -fmacro-prefix-map=zephyr=ZEPHYR_BASE -ffunction-sections -fdata-sections -std=c99 -nostdinc -MD -MT zephyr/CMakeFiles/offsets.dir/arch/riscv/core/offsets/offsets.c.obj -MF zephyr/CMakeFiles/offsets.dir/arch/riscv/core/offsets/offsets.c.obj.d -o zephyr/CMakeFiles/offsets.dir/arch/riscv/core/offsets/offsets.c.obj -c zephyr/arch/riscv/core/offsets/offsets.c
In file included from ../include/sys/atomic.h:468,
from ../include/kernel_includes.h:21,
from ../include/kernel.h:17,
from zephyr/arch/riscv/core/offsets/offsets.c:16:
zephyr/include/generated/syscalls/atomic.h:25:19: error: conflicting types for 'atomic_cas'
static inline int atomic_cas(atomic_t * target, atomic_val_t old_value, atomic_val_t new_value)
^~~~~~~~~~
In file included from ../include/kernel_includes.h:21,
from ../include/kernel.h:17,
from zephyr/arch/riscv/core/offsets/offsets.c:16:
../include/sys/atomic.h:44:20: note: previous definition of 'atomic_cas' was here
static inline bool atomic_cas(atomic_t *target, atomic_val_t old_value,
せっかくcmakeがうまくいった、と思ったのも束の間で、ninjaは見るのが嫌になるくらい大量のエラーを表示して失敗します。続きはまた今度。
コメント一覧
- コメントはありません。
この記事にコメントする
2020年2月1日
Zephyrのエントリアドレス
目次: Zephyr
Zephyrをqemu_riscv32ボード向けにコンフィグし、ビルドディレクトリ下でninja runを実行すると、最終的に下記のコマンドが実行され、QMEUが起動します。
QEMUの起動コマンド
$ /usr/bin/qemu-system-riscv32 -nographic -machine sifive_e -net none -chardev stdio,id=con,mux=on -serial chardev:con -mon chardev=con,mode=readline -kernel zephyr/build/zephyr/zephyr.elf -s -S
GDBで追うとわかりますが、QEMUの実行開始アドレスは0x1000です。0x1000には0x20400000にジャンプするコードだけが置かれています。
0x1000にあるコード
0x1000: lui t0,0x20400
=> 0x1004: jr t0
0x1008: unimp
0x100a: unimp
HiFive1実機であれば0x20400000はQSPI Flashがマッピングされているアドレスです(SiFive FE310-G000 Manual v2p3を参照)。QEMUの場合はELFファイルbuild/zephyr/zephyr.elfのセクション情報通りに配置されます。
0x1000にあるコード
$ riscv64-zephyr-elf-readelf -a build/zephyr/zephyr.elf | less ... Section Headers: [Nr] Name Type Addr Off Size ES Flg Lk Inf Al [ 0] NULL 00000000 000000 000000 00 0 0 0 [ 1] vector PROGBITS 20400000 000094 000010 00 AX 0 0 4 [ 2] exceptions PROGBITS 20400010 0000a4 000258 00 AX 0 0 4 [ 3] text PROGBITS 20400268 0002fc 002ad4 00 AX 0 0 4 [ 4] sw_isr_table PROGBITS 20402d3c 002dd0 000200 00 WA 0 0 4 [ 5] devconfig PROGBITS 20402f3c 002fd0 000060 00 A 0 0 4 [ 6] rodata PROGBITS 20402f9c 003030 000215 00 A 0 0 4 [ 7] datas PROGBITS 80000000 003248 000018 00 WA 0 0 4 [ 8] initlevel PROGBITS 80000018 003260 000060 00 WA 0 0 4 [ 9] _k_mutex_area PROGBITS 80000078 0032c0 000014 00 WA 0 0 4 [10] bss NOBITS 80000090 0032e0 00013c 00 WA 0 0 8 [11] noinit NOBITS 800001d0 0032e0 000e00 00 WA 0 0 16 ...
ジャンプ先の0x20400000にはvectorというセクションが対応していることがわかります。ELFファイルを逆アセンブルしてみると、
0x20400000にあるコード
zephyr/zephyr.elf: file format elf32-littleriscv
Disassembly of section vector:
20400000 <__start>:
/*
* Set mtvec (Machine Trap-Vector Base-Address Register)
* to __irq_wrapper.
*/
la t0, __irq_wrapper
20400000: 00000297 auipc t0,0x0
20400004: 01028293 addi t0,t0,16 # 20400010 <__irq_wrapper>
csrw mtvec, t0
20400008: 30529073 csrw mtvec,t0
/* Jump to __initialize */
tail __initialize
2040000c: 4b40106f j 204014c0 <__initialize>
以上のように __startという関数が居るようです。実装はzephyr/soc/riscv/riscv-privilege/common/vector.Sにあります。
Zephyrとデバイスツリー
このエントリポイントアドレスはどのように決まるのでしょう?Zephyrでは、ボード用のデバイスツリーzephyr/boards/riscv/qemu_riscv32/qemu_riscv32.dtsにあるFlashの先頭アドレスを変えるとELFのエントリポイント(0x20400000)も追従します。
ボード用のデバイスツリーのchosenノード
chosen {
zephyr,console = &uart0;
zephyr,shell-uart = &uart0;
zephyr,sram = &dtim;
zephyr,flash = &flash0;
};
このchosen以下を検知しているようです。スクリプトscripts/dts/gen_defines.pyを見ると、SPIのときだけ特殊処理になっていて、それ以外はregの値を先頭アドレスとみなしています。
Flashのサイズを見ている箇所
# zephyr/scripts/dts/gen_defines.py
...
def write_flash_node(edt):
# Writes output for the top-level flash node pointed at by
# zephyr,flash in /chosen
node = edt.chosen_node("zephyr,flash")
out_comment(f"/chosen/zephyr,flash ({node.path if node else 'missing'})")
if not node:
# No flash node. Write dummy values.
out("FLASH_BASE_ADDRESS", 0)
out("FLASH_SIZE", 0)
return
if len(node.regs) != 1:
err("expected zephyr,flash to have a single register, has "
f"{len(node.regs)}")
if node.on_bus == "spi" and len(node.bus_node.regs) == 2:
reg = node.bus_node.regs[1] # QSPI flash
else:
reg = node.regs[0]
out("FLASH_BASE_ADDRESS", hex(reg.addr))
if reg.size:
out("FLASH_SIZE", reg.size//1024)
...
FlashのアドレスはDT_FLASH_BASE_ADDRESSというマクロで参照できます。エントリーポイントを最終的に決めるのはリンカースクリプトです。SoCで独自のリンカースクリプトを実装することもできるようになっていますが、RISC-Vの多くのSoCは、下記のスクリプトを使っています。
エントリーポイントを決めている箇所
// zephyr/include/arch/riscv/common/linker.ld
MEMORY
{
#ifdef CONFIG_XIP
ROM (rx) : ORIGIN = DT_FLASH_BASE_ADDRESS, LENGTH = KB(DT_FLASH_SIZE)
#endif
RAM (rwx) : ORIGIN = CONFIG_SRAM_BASE_ADDRESS, LENGTH = KB(CONFIG_SRAM_SIZE)
/* Used by and documented in include/linker/intlist.ld */
IDT_LIST (wx) : ORIGIN = 0xFFFFF7FF, LENGTH = 2K
}
Zephyrのエントリポイントがどうやって決まるのか、少しわかった気がします。
コメント一覧
- コメントはありません。
この記事にコメントする
2020年1月31日
Hello! Zephyr OS!! (RISC-V 32bit版)
目次: Zephyr
以前Zephyr OSを実行しました(2019年1月12日の日記参照)が、今回はRISC-V 32bit版で試してみようと思います。
この例ではbuildをビルドディレクトリとします。どこに置いても動くはずですが、私はとりあえずzephyrの下に置いています。
クロスコンパイラの準備
前回同様Zephyr SDKもしくはCrosstool-NGが使えます。参考までにCrosstool-NGのコンフィグを載せておきます。
crosstool-NG RISC-V版のビルド
$ ./ct-ng menuconfig
Target options --->
Target Architecture (riscv) --->
[*] Build a multilib toolchain (READ HELP!!!)
Bitness: (64-bit) --->
(rv32ima) Architecture level
(ilp32) Generate code for the specific ABI
Toolchain options --->
(zephyr) Tuple's vendor string
Debug facilities --->
[*] gdb --->
[*] Build a static cross gdb
一見すると32bit CPUのコードをビルドする予定なのに、Bitness: 64bitにしており、不思議なコンフィグに見えるかもしれませんが、Zephyr OSのビルドはクセがあって、この設定が必要です。
Architecture level, Generate code for the specific ABIはGCCが生成するバイナリの命令セットを指定しており、それぞれ -march=rv32ima, -mabi=ilp32に対応します。特に何も指定しないとrv32gc, ilp32fになるようです。
ZephyrのCMakeスクリプト
zephyr/cmake/toolchain/xtools/target.cmake
set(CROSS_COMPILE_TARGET_riscv riscv64-zephyr-elf)
set(CROSS_COMPILE_TARGET ${CROSS_COMPILE_TARGET_${ARCH}})
ZephyrのCMakefileを見るとわかるんですが、riscv64もriscv32も区別せず同じコンパイラでビルドし、しかもコンパイラ名は常にriscv64-zephyr-elf-gccだと思っています。したがって64bit版をビルドする必要があり、multilibを有効にしています。
(余談)riscv向けの -mabi, -marchオプションの値を決めているのはzephyr/cmake/compiler/gcc/target.cmakeで、rv32ima固定になっています。
- list(APPEND TOOLCHAIN_C_FLAGS -mabi=ilp32 -march=rv32ima)
+ list(APPEND TOOLCHAIN_C_FLAGS -mabi=ilp32f -march=rv32gc)
上記のように変えると、Crosstool-NGでArchitecture level, Generate code for the specific ABIの設定をしなくても良くなりますが、動くかどうかは試していません。
ビルドの方法
実ボードを持っていないのでQEMUで試します。SiFive HiFive1をエミュレートしているそうです。
環境変数のセットアップとcmakeの実行
$ cat ~/.zephyrrc export ZEPHYR_TOOLCHAIN_VARIANT=xtools export XTOOLS_TOOLCHAIN_PATH=/home/katsuhiro/x-tools $ cd zephyr $ source zephyr-env.sh $ mkdir build $ cd build $ cmake -G Ninja -DBOARD=qemu_riscv32 ../samples/hello_world/ -- Zephyr version: 2.1.99 -- Found PythonInterp: /usr/bin/python3 (found suitable version "3.7.6", minimum required is "3.6") -- Selected BOARD qemu_riscv32 -- Loading /home/katsuhiro/share/projects/oss/zephyr/boards/riscv/qemu_riscv32/qemu_riscv32.dts as base Devicetree configuration written to /home/katsuhiro/share/projects/oss/zephyr/build/zephyr/include/generated/devicetree.conf Parsing /home/katsuhiro/share/projects/oss/zephyr/Kconfig Loaded configuration '/home/katsuhiro/share/projects/oss/zephyr/boards/riscv/qemu_riscv32/qemu_riscv32_defconfig' Merged configuration '/home/katsuhiro/share/projects/oss/zephyr/samples/hello_world/prj.conf' Configuration saved to '/home/katsuhiro/share/projects/oss/zephyr/build/zephyr/.config' -- The C compiler identification is GNU 8.3.0 -- The CXX compiler identification is GNU 8.3.0 -- The ASM compiler identification is GNU -- Found assembler: /home/katsuhiro/x-tools/riscv64-zephyr-elf/bin/riscv64-zephyr-elf-gcc -- Cache files will be written to: /home/katsuhiro/.cache/zephyr -- Configuring done -- Generating done -- Build files have been written to: /home/katsuhiro/share/projects/oss/zephyr/build
実行するときはninja runで良いんですが、前回同様にninjaが何を起動しているか調べてみます。
Zephyr OS実行
$ /usr/bin/qemu-system-riscv32 -nographic -machine sifive_e -net none -chardev stdio,id=con,mux=on -serial chardev:con -mon chardev=con,mode=readline -kernel /home/katsuhiro/share/projects/oss/zephyr/build/zephyr/zephyr.elf -s -S (gdbからcontinueをすると、下記が出力される) *** Booting Zephyr OS build zephyr-v2.1.0-1471-g7e7a4426d835 *** Hello World! qemu_riscv32
オプション -sはGDBの接続をlocalhost:1234で受け付けます、という意味です。オプション -SはエミュレータをHalted状態で起動します。もしGDBをつなぐ必要がなければ -sや -Sを削って起動してください。
GDB接続
$ riscv64-zephyr-elf-gdb GNU gdb (crosstool-NG 1.24.0.60-a152d61) 8.3.1 Copyright (C) 2019 Free Software Foundation, Inc. ... (gdb) set arch riscv:rv32 The target architecture is assumed to be riscv:rv32 (gdb) target remote localhost:1234 Remote debugging using localhost:1234 warning: No executable has been specified and target does not support determining executable automatically. Try using the "file" command. 0x00001000 in ?? () (gdb) continue Continuing.
実行できました。おなじみのHello World! です。
コメント一覧
- コメントはありません。
この記事にコメントする
2020年1月27日
クロスビルド用ツールチェーン - GCC 10.0にしたらハマった
目次: GCC
新し目のAArch64のクロスコンパイル用ツールチェーンを作ろうとして、かなりハマったのでメモしておきます。
基本的には前回(2019年4月29日の日記参照)ご紹介した手順でビルドします。GCCとglibcのコードを変えなくて良い組み合わせは下記の通りです。特に新しいバージョンを使う理由がなければ、この組み合わせが無難です。
- gcc: 8.3.0 (tag: releases/gcc-8.3.0)
- glibc: 2.28 (tag: glibc-2.28)
私は新しいGCCが使いたかったので、HEADにしました(バージョン的には10.0相当)。どうやらGCCのエラーチェックが厳しくなるらしく、glibcのビルドが通らなくなります。たくさんエラーが出ますが、一例を挙げると、下記のようなエラーです。
GCC HEAD (GCC 10.0相当) でglibc 2.28をビルドするとコンパイルエラー
./../include/libc-symbols.h:534:26: error: '__EI___errno_location' specifies less restrictive attributes than its target '__errno_location': 'const', 'nothrow' [-Werror=missing-attributes]
534 | extern __typeof (name) __EI_##name \
| ^~~~~
エラーはglibcを新しくすると解決されるかと思いきや、よりおかしなことになります。例えばGCC 8.3のままglibc 2.30(おそらく2.29でも同じ症状が出る)にすると、下記のような変なエラーが出ます。
GCC 8.3でglibc 2.30をビルドするとリンクエラー
crosstool-builder-new-aarch64/buildroot/lib/gcc/aarch64-unknown-linux-gnu/8.3.0/../../../../aarch64-unknown-linux-gnu/bin/ld: crosstool-builder-new-aarch64/build/glibc/support/links-dso-program.o: Relocations in generic ELF (EM: 62) crosstool-builder-new-aarch64/buildroot/lib/gcc/aarch64-unknown-linux-gnu/8.3.0/../../../../aarch64-unknown-linux-gnu/bin/ld: crosstool-builder-new-aarch64/build/glibc/support/links-dso-program.o: Relocations in generic ELF (EM: 62) ...
エラーの原因となっているオブジェクトlinks-dso-program.oを調べると、AArch64向けにビルドしているにも関わらず、なぜかx86_64用のオブジェクトが生成されています。
glibc/support下に生成されたオブジェクト
build/glibc/support$ file *.o echo-container.o: ELF 64-bit LSB relocatable, ARM aarch64, version 1 (SYSV), with debug_info, not stripped links-dso-program.o: ELF 64-bit LSB relocatable, x86-64, version 1 (SYSV), with debug_info, not stripped ★★★★これ★★★★ shell-container.o: ELF 64-bit LSB relocatable, ARM aarch64, version 1 (SYSV), with debug_info, not stripped stamp.o: empty test-container.o: ELF 64-bit LSB relocatable, ARM aarch64, version 1 (SYSV), with debug_info, not stripped true-container.o: ELF 64-bit LSB relocatable, ARM aarch64, version 1 (SYSV), with debug_info, not stripped
いったい何ですかね、これ。バグなのか、仕様なのかわかりません……。
GCC 10.0とglibc 2.30の組み合わせでビルドする方法
GCCとglibcをお互い最新にした組み合わせ、すなわち下記の組み合わせにしたとき、
- gcc: 10.0 (HEAD)
- glibc: 2.30 (tag: glibc-2.30)
先ほど説明した、両方のエラーに遭遇してビルドできませんので、glibcにパッチを当ててビルドエラーを回避します。
まずはコンパイルエラーを無視するパッチです。本来はエラーを無視するのではなく、エラーが指摘している事項を直すべきですけど、今回の主眼ではないのと、いずれglibc本家が直るだろうことを期待しておきます。
glibcのビルドエラーをあえて無視するパッチ
diff --git a/Makeconfig b/Makeconfig
index fd36c58c04..106688e210 100644
--- a/Makeconfig
+++ b/Makeconfig
@@ -916,7 +916,8 @@ ifeq "$(strip $(+cflags))" ""
endif # $(+cflags) == ""
+cflags += $(cflags-cpu) $(+gccwarn) $(+merge-constants) $(+math-flags) \
- $(+stack-protector)
+ $(+stack-protector) \
+ -Wno-zero-length-bounds -Wno-array-bounds -Wno-maybe-uninitialized
+gcc-nowarn := -w
# Each sysdeps directory can contain header files that both will be
次のlinks-dso-programはコミットログを見る限り、テストのサポート用ライブラリなので、とりあえず無くても動くはずです。ビルド自体をやめるパッチをあてます。
glibcのsupport/links-dso-programをビルドさせないパッチ
diff --git a/support/Makefile b/support/Makefile
index ab66913a02..19c3de2043 100644
--- a/support/Makefile
+++ b/support/Makefile
@@ -184,12 +184,12 @@ CFLAGS-support_paths.c = \
-DSBINDIR_PATH=\"$(sbindir)\" \
-DROOTSBINDIR_PATH=\"$(rootsbindir)\"
-ifeq (,$(CXX))
-LINKS_DSO_PROGRAM = links-dso-program-c
-else
-LINKS_DSO_PROGRAM = links-dso-program
-LDLIBS-links-dso-program = -lstdc++ -lgcc -lgcc_s $(libunwind)
-endif
+#ifeq (,$(CXX))
+#LINKS_DSO_PROGRAM = links-dso-program-c
+#else
+#LINKS_DSO_PROGRAM = links-dso-program
+#LDLIBS-links-dso-program = -lstdc++ -lgcc -lgcc_s $(libunwind)
+#endif
ifeq (yes,$(have-selinux))
LDLIBS-$(LINKS_DSO_PROGRAM) += -lselinux
クロスコンパイル環境は、各モジュールのバージョンアップですぐ壊れてしまって辛いです。ARMがこれだけ覇権を握っているにも関わらず、gccもglibcもあまりチェックしてないんですかね……??
後日追記
わざわざMakefileを書き換えなくてもmake LINKS_DSO_PROGRAM= のように、make実行時にLINKS_DSO_PROGRAM変数の値を強制的に空文字列に上書きすれば回避可能でした。理由は昔の日記で書いた通り(2019年9月17日の日記参照)、コマンドラインからの変数指定はMakefile内の代入より強いからです。
Makefile書き換えよりは多少スマートですけども、クロスコンパイルの時だけこんな指定が必要なのは妙ですね。まだ何か見落としているんでしょうかね?
コメント一覧
- superzerosさん(2020/04/15 19:59)
ARM64 target (cortexa53)と x86_64 host (Ryzen7)のクロスコンパイラのビルドで、当方にもご指摘のエラーがありました。で、そのパッチを拝借したところ、見事GLIBCのコンパイルが通りました。
ありがとうございました!
なんと申しましょうか、とても柔軟かつ大胆に繊細な対応をなされますね。
補足:当方の各パッケージのバージョンは latest(2020-04-15)
linux-5.6.4 (headers)
gcc-9.3.0
glibc-2.31
binutils-2.34
configure やBUILD手法は archlinux PKGBUILD と Cross LFS BOOK 等のWEB情報を参考にして適当にやっております(笑 - すずきさん(2020/04/15 23:13)
コメントありがとうございます。お役に立ったようで良かったです。
動作に支障無さそうなところだったので、かなり適当に変えてしまいました。
大胆というか適当というか……。 - superzerosさん(2020/04/16 21:07)
少し気になったのでglibcの履歴を調べてみたら・・・
glibc-2.31/support/links-dso-program-c.c
glibc-2.31/support/links-dso-program.cc
このファイルは、2.29で最初に追加され
\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
#include <iostream>
using namespace std;
int
main (int argc, char **argv)
/* Complexity to keep gcc from optimizing this away. */
cout << (argc > 1 ? argv[1] : "null");
return 0;
\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
で、続いて2.30では
\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
#include <iostream>
/* makedb needs selinux dso's. */
#ifdef HAVE_SELINUX
# include <selinux/selinux.h>
#endif
using namespace std;
/* The purpose of this file is to indicate to the build system which
shared objects need to be copied into the testroot, such as gcc or
selinux support libraries. This program is never executed, only
scanned for dependencies on shared objects, so the code below may
seem weird - it's written to survive gcc optimization and force
such dependencies.
*/
int
main (int argc, char **argv)
/* Complexity to keep gcc from optimizing this away. */
cout << (argc > 1 ? argv[1] : "null");
#ifdef HAVE_SELINUX
/* This exists to force libselinux.so to be required. */
cout << "selinux " << is_selinux_enabled ();
#endif
return 0;
\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
2.29では、どういう経緯で誰によって導入されたのか、知りませんけど
2.30では、SElinux(国家安全保障局)がどうたらこうたらの追加です
誰のためになるんでしょうか ・・・
自分の所有するハードウエアを自分で使いこなしたいだけのわたしからすれば
バージョンアップに紛れ込んだオープンソースへの破壊活動みたいなもんですよ
貴重な時間を奪われるところでしたが、おかげさまですぐに解決できてよかったです
貴方に感謝いたします
\(^o^)/
- すずきさん(2020/04/18 23:05)
詳細は調べていないので、コード中のコメントからの想像ですが……破壊活動というほどではないかなと思います。
SELinux が有効なときは、SELinux のライブラリがないと動かないのでしょう。このヘルパープログラムは SELinux のライブラリを使っているから、ビルドシステムはテスト用の rootfs に SELinux のライブラリをコピーしてくれ、ということを示すための変更だと思います。
この記事にコメントする
2020年1月26日
C言語の未定義動作と最適化
目次: C言語とlibc
くそ長いですが、C言語の未定義動作怖いね、printfでタイミング以外も動き変えられるよ、という話です。
環境ですがx86_64向けDebian GNU/Linux 9.2で実行しています。またGCCのバージョンはgcc (Debian 9.2.1-22) 9.2.1 20200104です。
未定義動作のため、コンパイラの種類や、GCCのバージョンにより結果が変わると思われます。お家のマシンで試すならご留意ください。
1番目の実験
この日記の最後に貼ったプログラム(このプログラムをコンパイルすると、激しい警告が出ます)をgcc -Wall -O2 a.c && ./a.outのように実行すると、
1番目の実験: あれ?バッファオーバーランは…?
0: 0 0 0 1: 0 1 0 2: 0 2 0 3: 0 3 0 4: 0 4 0 ... 47: 0 47 0 48: 0 48 0 49: 0 49 0 1770: 1770
こうなります。0〜59の和は1770です。あってます。良かったですね。
なに?そういう問題じゃない?「なぜarray終端を超えてguard2にバッファオーバーランしない?」と考えた方、するどいです。しかし世の中そう単純ではありません。
2番目の実験
10行目のprintfのコメントを外してローカル変数のアドレスを表示させると、
2番目の実験: 10行目のprintfを有効、突然のバッファオーバーラン
0x7ffd9b348a10 0x7ffd9b348ae0 0x7ffd9b348bb0 0: 0 0 52 1: 0 1 53 2: 0 2 54 3: 0 3 55 4: 0 4 56 ... 45: 0 45 0 46: 0 46 0 47: 0 47 0 48: 0 48 0 49: 0 49 0 1770: 1770
こうなります。突然オーバーランするようになりました。printfが何かしたんでしょうか、不思議ですね?
3番目の実験
どうしてforループを無意味に2分割したのか?くっつけてみたらわかります。Segmentation Fault します。
3番目の実験: ループを1つにするとクラッシュ
0: 0 0 0 1: 0 1 0 2: 0 2 0 3: 0 3 0 4: 0 4 0 ... 45: 0 45 0 46: 0 46 0 47: 0 47 0 48: 0 48 0 49: 0 49 0 Segmentation fault
もう意味不明ですよね。何が起こっているんでしょう?
タネ明かし
この60回のforループは「配列の終端を超えたアクセス」がC言語仕様上の未定義動作なので、何が起きても正しい、つまりどの結果も正しいです。
これだけだと、何言ってんのか意味不明だと思うので「printf有効/無効」「forループ1つ/2つ」に着目して説明します。
- 1番目の実験(printf無効、forループ2つ)
-
プログラムを見るとguard1, guard2に対してmemset 0した後、参照のみで代入しません。コンパイラはguard1, guard2をスタックに配置せず、配列への参照(guard1[i], guard2[i])は全て「定数の0」に置換します。
(GIMPLEを見たら033t.fre1で0に置換されるようです)
このときarrayのバッファオーバーランはスタックに退避されているレジスタ値などを書きつぶしますが、ギリギリ続行できています。 - 2番目の実験(printf有効、forループ2つ)
-
1番目と変わりないと思いきや、printfがguard1, guard2のアドレス参照をするため、定数の0に置換すると返せるアドレスがなくなり結果が変わってしまいます。このため、guard1, guard2はスタックに配置されます。
このときarrayのバッファーオーバーランは隣に配置されたguard2を書きつぶします。 - 3番目の実験(printf無効、forループ1つ)
- いわゆる偶然の結果です。1番目と同様にguard1, guard2はスタックに配置されず、arrayのバッファオーバーランによりスタックに退避したレジスタ値などが壊れます。forループが1つ減ったことでスタックに退避されるレジスタが1つ減って(8バイト分余裕がなくなる)、1番目の実験でギリギリリターンアドレスを壊されずに耐えていたものが、耐えられなくなります。
3番目の実験の裏打ちとして、試しにループ回数を80回くらいにするとforループが1つだろうが2つだろうが、リターンアドレスがぶっ壊れてSegmentation Fault します。10行目のprintfを有効にするとguard1, guard2がスタックに配置されて、受け止めてくれるので、80回でも耐えます。
難解なC言語仕様、曖昧な利用者の理解、過激なコンパイラの最適化、が招く結末
バッファオーバーランを期待していた向きには残念(?)かもしれませんが、guard1, guard2はメモリ上に置いても置かなくても、C言語仕様に矛盾しないなら、どっちでも良いです。もっというとC言語仕様に矛盾しないなら、コンパイラの最適化は何をやってもOK です。
この「C言語仕様に矛盾しないなら」はおそらくコンパイラ開発者には常識なのでしょうけども、C言語の仕様は人間に優しくないのと、大多数のC言語プログラマは言語仕様(特に未定義動作)を理解しておらず、何となく使っています。
難解な仕様、曖昧な理解、過激な最適化の相乗効果により、今日も世界のどこかで
「最適化で動きが変になっちゃったよ……。どうして…どうして……?」
とコンパイラとすれ違ったプログラマが泣いているでしょう。。。
参考
大したものではありませんが、ソースコードを載せておきます。
実験用ソースコード
#include <stdio.h>
#include <string.h>
int undefined()
{
int guard1[50];
int array[50];
int guard2[50];
int sum = 0, i;
memset(guard1, 0, sizeof(guard1));
memset(guard2, 0, sizeof(guard2));
//printf("%p %p %p\n", &guard1[0], &array[0], &guard2[0]);
for (i = 0; i < 60; i++) {
array[i] = i;
}
for (i = 0; i < 60; i++) {
sum += array[i];
}
for (i = 0; i < 50; i++) {
printf("%2d: %d %d %d\n", i, guard1[i], array[i], guard2[i]);
}
return sum;
}
int main(int argc, char *argv[])
{
int sum1 = 0, sum2 = 0, i;
sum1 = undefined();
for (i = 0; i < 60; i++) {
sum2 += i;
}
printf("%d: %d\n", sum1, sum2);
return 0;
}
コメント一覧
- コメントはありません。
この記事にコメントする
| < | 2020 | > | ||||
| << | < | 02 | > | >> | ||
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| - | - | - | - | - | - | 1 |
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
最近のコメント5件
最近の記事20件
-
 25年9月7日
25年9月7日
すずき (09/08 01:42)
「[ジャガーXEのタイヤ交換] 目次: 車タイヤのメーカーが左前だけ違うのと、溝の残りが4mmくらいで結構減ってしまっていたので...」 -
25年9月5日
すずき (09/08 00:22)
「[パスポート受け取り] 訳あって台風の豪雨の中強行軍で、有楽町のパスポートセンターへパスポート受け取りにいってきました。運悪く...」 -
23年5月15日
すずき (09/08 00:01)
「[車 - まとめリンク] 目次: 車三菱FTOの話。群馬県へのドライブ1群馬県へのドライブ2将来車を買い替えるとしたら?FTO...」 -
22年7月8日
すずき (08/31 16:17)
「[マンガ紹介 - まとめリンク] 目次: マンガ紹介面白かった漫画の紹介です。知名度はあまり気にせず紹介します。5作品乙女ゲー...」 -
25年8月8日
すずき (08/31 16:15)
「[マンガ紹介] 目次: マンガ紹介久しぶりにお気に入りのマンガ紹介シリーズ。既刊が10巻以上あって今後も楽しみな作品をいくつか...」 -
23年4月10日
すずき (08/31 12:58)
「[Linux - まとめリンク] 目次: Linux関係の深いまとめリンク。目次: RISC-V目次: ROCK64/ROCK...」 -
25年8月25日
すずき (08/31 12:58)
「[LinuxでPTPを使う方法] 目次: LinuxNTPより精密な時刻同期の方法PTP(Precision Time Pro...」 -
25年8月30日
すずき (08/30 17:58)
「[日本のガソリンスタンド] 目次: 車ガソリンスタンドは統廃合が進んで、ENEOS、コスモ、出光(apollostation)...」 -
20年8月24日
すずき (08/28 23:30)
「[ALSAループバックデバイスで簡易リモート再生] 目次: ALSAデスクトップPCにはスピーカーを繋いでいませんが、たまに音...」 -
23年6月1日
すずき (08/21 01:43)
「[自宅サーバー - まとめリンク] 目次: 自宅サーバーこの日記システム、Wikiの話。カウンターをPerlからPHPに移植日...」 -
13年5月10日
すずき (08/21 01:43)
「[Debian 7.0 Wheezyにアップデート] 目次: 自宅サーバーリリースノートを読みつつ、apt-get updat...」 -
15年4月30日
すずき (08/21 01:42)
「[Debian 8.0 Jessieにアップデート] 目次: 自宅サーバーDebianのアップデートが来ていたので、試しに職場...」 -
23年6月13日
すずき (08/21 01:42)
「[Debian 12 Bookwormにアップデート] 目次: 自宅サーバーDebianの更新はとても簡単でありがたいですが、...」 -
25年8月17日
すずき (08/21 01:40)
「[Debian 13 Trixieにアップデート] 目次: 自宅サーバー先日8/9にDebian 13がリリースされました。コ...」 -
25年8月20日
すずき (08/21 01:38)
「[パスポートのオンライン申請] 海外出張の予定が発生してパスポートが必要になりました。以前発行した10年パスポートの発行日を見...」 -
25年8月15日
すずき (08/17 06:26)
「[帰省終わり、東京へ] 帰ってきました。東京に降り立った瞬間に暑くてイヤになりました……。朝10時...」 -
25年8月11日
すずき (08/17 06:20)
「[帰省始まり、北海道へ] 北海道に帰省しました。今年は北海道も30℃超え連発で割と暑い年とはいえ、東京と決定的に違う点は湿度で...」 -
25年7月25日
すずき (07/30 01:36)
「[電装系が微妙なジャガーさん] 目次: 車車を買い替えてから1週間くらい経ちました。通勤路以外は幹線道路や高速をメインにしばし...」 -
19年9月1日
すずき (07/30 01:36)
「[カーナビを買いました] 目次: 車一昨年にカーナビが壊れて(2017年9月3日の日記参照)以来、カーナビを使わず過ごしていま...」 -
25年7月20日
すずき (07/22 01:56)
「[ジャガーXE Sを買いました] 目次: 車車を買い替えました。ジャガーXE Sです。マイナー車すぎて会社の人たちもあまり知ら...」
こんてんつ
wiki Linux JM Java API過去の日記
2002年 2003年 2004年 2005年 2006年 2007年 2008年 2009年 2010年 2011年 2012年 2013年 2014年 2015年 2016年 2017年 2018年 2019年 2020年 2021年 2022年 2023年 2024年 2025年 過去日記についてその他の情報
アクセス統計 サーバ一覧 サイトの情報
合計:
本日:
