
2018年7月15日
AArch64向けLinux開発環境の構築 その1
目次: GCC
目次: Linux
AArch64(64ビットARM)向けのLinux開発環境を構築しました。超有名ツールの組み合わせだし、簡単だろうと思っていたのですが、意外とハマって1日掛かってしまったのでメモしておきます。使用するツールは下記の通りです。
- クロスコンパイラ: crosstool-NG
- カーネル: linux-next
- ルートファイルシステム: buildroot
- エミュレータ: qemu
クロスコンパイラ
クロスコンパイラを生成するためcrosstool-NG(GitHubへのリンク)を使います。crosstool-NGはARM向け以外にもクロスコンパイラやツールチェインの構築が簡単にできて便利です。
私の環境(Debian Testing)だとlibtool-binパッケージがインストールされていなくてハマったので、インストールしておくと良いかもしれません。
crosstool-NGコード取得、セットアップ
$ git clone https://github.com/crosstool-ng/crosstool-ng $ cd crosstool-ng $ ./bootstrap INFO :: *** Generating package version descriptions INFO :: Master packages: android-ndk autoconf automake avr-libc binutils cloog duma elf2flt expat gcc gdb gettext glibc-ports glibc gmp isl libelf libiconv libtool linux ltrace m4 make mingw-w64 mpc mpfr musl ncurses newlib strace uClibc zlib INFO :: Generating 'config/versions/android-ndk.in' INFO :: Generating 'config/versions/autoconf.in' ...(snip)... INFO :: Generating comp_libs.in (menu) INFO :: *** Gathering the list of data files to install INFO :: *** Running autoreconf INFO :: *** Done! $ ./configure --enable-local checking for a BSD-compatible install... /usr/bin/install -c checking whether build environment is sane... yes checking for a thread-safe mkdir -p... /bin/mkdir -p ...(snip)... config.status: creating config.h config.status: config.h is unchanged config.status: executing depfiles commands $ make /usr/bin/make all-recursive make[1]: Entering directory '/home/katsuhiro/share/projects/oss/crosstool-ng' Making all in kconfig make[2]: Entering directory '/home/katsuhiro/share/projects/oss/crosstool-ng/kconfig' bison -y -l -b zconf -p zconf -ozconf.c zconf.y ...(snip)... /bin/mkdir -p docs && ( /bin/sed -e 's,[@]docdir[@],/usr/local/share/doc/crosstool-ng,g' -e 's,[@]pkgdatadir[@],/usr/local/share/crosstool-ng,g' -e 's,[@]pkglibexecdir[@],/usr/local/libexec/crosstool-ng,g' -e 's,[@]progname[@],'`echo ct-ng | sed 's,x,x,'`',g' | /bin/bash config.status --file=- ) < docs/ct-ng.1.in >docs/ct-ng.1-t && mv -f docs/ct-ng.1-t docs/ct-ng.1 make[2]: Leaving directory '/home/katsuhiro/share/projects/oss/crosstool-ng' make[1]: Leaving directory '/home/katsuhiro/share/projects/oss/crosstool-ng'
カレントディレクトリにct-ngという名前のファイルが生成されます。通常はクロスコンパイラをインストールして使いますが、私はインストールしないで欲しい(適宜入れ替えたいから)ので、--enable-localオプションを付けています。
crosstool-NGビルド
$ ./ct-ng menuconfig
- Target options --->
Target Architecture (alpha) --->
armに変更する
Bitness: (32-bit) --->
64-bitに変更する
- Operating System --->
Target OS (bare-metal) --->
linuxに変更する
- C compiler --->
C++ (NEW) を選択する
$ ./ct-ng build
[00:34] /
ビルド中は多少メッセージも出ますが、基本的に経過時間と棒がくるくる回るだけです。ログが見たい方は、ct-ngと同じディレクトリにあるbuild.logをtail -fなどで表示すると良いでしょう。
マシン性能によりますが、./ct-ng buildによるクロスコンパイラのビルドは1時間くらい掛かると思います。ビルドが終わると、ホームディレクトリにx-toolsというディレクトリが作られていると思います。AArch64用のクロスコンパイラ(gcc 8)をビルドした場合、x-tools以下は下記のようになっているはずです。
crosstool-NG生成物
$ cd ~/x-tools $ ls aarch64-unknown-linux-gnu $ ls aarch64-unknown-linux-gnu aarch64-unknown-linux-gnu bin build.log.bz2 include lib libexec share $ ls aarch64-unknown-linux-gnu/bin aarch64-unknown-linux-gnu-addr2line aarch64-unknown-linux-gnu-gcov-dump aarch64-unknown-linux-gnu-ar aarch64-unknown-linux-gnu-gcov-tool aarch64-unknown-linux-gnu-as aarch64-unknown-linux-gnu-gfortran aarch64-unknown-linux-gnu-c++ aarch64-unknown-linux-gnu-gprof aarch64-unknown-linux-gnu-c++filt aarch64-unknown-linux-gnu-ld aarch64-unknown-linux-gnu-cc aarch64-unknown-linux-gnu-ld.bfd aarch64-unknown-linux-gnu-cpp aarch64-unknown-linux-gnu-ld.gold aarch64-unknown-linux-gnu-ct-ng.config aarch64-unknown-linux-gnu-ldd aarch64-unknown-linux-gnu-dwp aarch64-unknown-linux-gnu-nm aarch64-unknown-linux-gnu-elfedit aarch64-unknown-linux-gnu-objcopy aarch64-unknown-linux-gnu-g++ aarch64-unknown-linux-gnu-objdump aarch64-unknown-linux-gnu-gcc aarch64-unknown-linux-gnu-populate aarch64-unknown-linux-gnu-gcc-7.3.0 aarch64-unknown-linux-gnu-ranlib aarch64-unknown-linux-gnu-gcc-ar aarch64-unknown-linux-gnu-readelf aarch64-unknown-linux-gnu-gcc-nm aarch64-unknown-linux-gnu-size aarch64-unknown-linux-gnu-gcc-ranlib aarch64-unknown-linux-gnu-strings aarch64-unknown-linux-gnu-gcov aarch64-unknown-linux-gnu-strip
クロスコンパイラは~/x-tools/aarch64-unknown-linux-gnu/bin以下にあります。今後、このクロスコンパイラを使います。
カーネル
カーネルはLinuxの開発版linux-nextを使います(Gitリポジトリへのリンク)。StableカーネルやLTSカーネルも同じ手順で良いと思いますが、古いカーネルをビルドするときは、crosstool-NGでgcc 7かgcc 6を選択したほうが良いかもしれません(ビルド時に警告が出てくると邪魔なので…)。
linux-nextコード取得、セットアップ、ビルド
$ git clone git://git.kernel.org/pub/scm/linux/kernel/git/next/linux-next.git $ cd linux-next $ export ARCH=arm64 $ export CROSS_COMPILE=~/x-tools/aarch64-unknown-linux-gnu/bin/aarch64-unknown-linux-gnu- $ make defconfig $ make all scripts/kconfig/conf --syncconfig Kconfig WRAP arch/arm64/include/generated/uapi/asm/ioctl.h WRAP arch/arm64/include/generated/uapi/asm/errno.h WRAP arch/arm64/include/generated/uapi/asm/ioctls.h ...(snip)... LD [M] sound/soc/generic/snd-soc-simple-card-utils.ko LD [M] sound/soc/generic/snd-soc-simple-card.ko LD [M] sound/soc/sh/rcar/snd-soc-rcar.ko
マシン性能によりますが、カーネルのビルドは数十分くらい掛かると思います。AArch64用のカーネルをビルドした場合、arch/arm64/boot以下は下記のようになっているはずです。
linux-next生成物
$ cd arch/arm64/boot $ ls Image Image.gz Makefile dts install.sh
ビルドが終わると、arch/arm64/boot以下にImageという名前のファイルが作られていると思います。このイメージファイルを後で使います。
コメント一覧
- コメントはありません。
 この記事にコメントする
この記事にコメントする
2018年7月16日
AArch64向けLinux開発環境の構築 その2
目次: GCC
目次: Linux
昨日の続きです。AArch64(64ビットARM)向けのLinux開発環境を構築しました。使用するツールは下記の通りです。
- クロスコンパイラ: crosstool-NG
- カーネル: linux-next
- ルートファイルシステム: buildroot
- エミュレータ: qemu
カーネルのビルドまで終わりましたので、次はルートファイルシステムです。
ルートファイルシステム
ルートファイルシステムの構築にはbuildrootを使います(Gitリポジトリへのリンク)。
buildrootコード取得、セットアップ、ビルド
$ git clone https://git.buildroot.net/buildroot
$ cd buildroot
$ make menuconfig
- Target options --->
Target Architecture (i386) --->
AArch64 (little endian) に変更する
- Toolchain --->
Toolchain type (Buildroot toolchain) --->
External toolchainに変更する
Toolchain (Linaro AArch64 2018.05) --->
Custom toolchainに変更する
() Toolchain path (NEW)
/home/username/x-tools/aarch64-unknown-linux-gnuに変更する(チルダ ~ は使えないので、注意)
($(ARCH)-linux) Toolchain prefix
aarch64-unknown-linux-gnuに変更する
External toolchain gcc version (4.3.x) --->
8.xに変更する(crosstool-NGの設定と合わせる)
External toolchain kernel headers series (2.6.x) --->
4.16.xに変更する(crosstool-NGの設定と合わせる)
External toolchain C library (uClibc/uClibc-ng) --->
glibc/eglibcに変更する(crosstool-NGの設定と合わせる)
Toolchain has C++ support? (NEW)
設定する
- Filesystem images --->
cpio the root filesystem (for use as an initial RAM filesystem)
設定する
$ make
/usr/bin/make -j1 O=/home/katsuhiro/share/projects/oss/buildroot/output HOSTCC="/usr/lib/ccache/gcc" HOSTCXX="/usr/lib/ccache/g++" silentoldconfig
...(snip)...
マシン性能によりますが、ほぼbusyboxしかビルドしませんので、カーネルよりは短い時間で終わるはずです。生成されたファイルはoutputディレクトリに集められています。output以下は下記のようになっているはずです。
buildroot生成物
$ ls output build host images staging target $ ls output/images/ rootfs.cpio rootfs.tar
ディレクトリには2つファイルがありますが、cpioフォーマットの方(rootfs.cpio)を使います。
エミュレータ
エミュレータはqemu(Gitリポジトリへのリンク)を使います。qemuのビルドは後回しにして、とりあえず今までビルドしてきたカーネル+ルートファイルシステムを実行してみます。
Debianの場合はapt-get install qemu-systemでインストール可能です。
qemu実行
$ qemu-system-aarch64 -machine virt -cpu cortex-a57 -kernel linux-next/arch/arm64/boot/Image -initrd buildroot/output/images/rootfs.cpio -serial stdio [ 0.000000] Booting Linux on physical CPU 0x0000000000 [0x411fd070] [ 0.000000] Linux version 4.18.0-rc4-next-20180713 (katsuhiro@blackbird) (gcc version 8.1.0 (crosstool-NG 1.23.0.418-d590)) #1 SMP PREEMPT Mon Jul 16 14:38:51 JST 2018 [ 0.000000] Machine model: linux,dummy-virt [ 0.000000] efi: Getting EFI parameters from FDT: [ 0.000000] efi: UEFI not found. ...(snip)... [ 3.409356] ALSA device list: [ 3.410631] No soundcards found. [ 3.419281] uart-pl011 9000000.pl011: no DMA platform data [ 3.534574] Freeing unused kernel memory: 1344K Starting logging: OK Initializing random number generator... [ 5.446846] random: dd: uninitialized urandom read (512 bytes read) done. Starting network: OK Welcome to Buildroot buildroot login: root # uname -a Linux buildroot 4.18.0-rc4-next-20180713 #1 SMP PREEMPT Mon Jul 16 14:38:51 JST 2018 aarch64 GNU/Linux
オプションでハマったのは -cpu cortex-a57です。省略するとAArch64に対応していないCPUがデフォルトで選ばれるようで、全く動かないです。明示的にARMv8のCPUを指定してください。また -serial stdioを付けないと、シリアルが出力されません。
このときinitramfsを指定し忘れると、起動はしますが下記のようなメッセージを表示して停止します。
Linuxがpanicで止まる
$ qemu-system-aarch64 -machine virt -cpu cortex-a57 -kernel linux-next/arch/arm64/boot/Image -serial stdio [ 0.000000] Booting Linux on physical CPU 0x0000000000 [0x411fd070] [ 0.000000] Linux version 4.18.0-rc4-next-20180713 (katsuhiro@blackbird) (gcc version 8.1.0 (crosstool-NG 1.23.0.418-d590)) #1 SMP PREEMPT Mon Jul 16 14:38:51 JST 2018 [ 0.000000] Machine model: linux,dummy-virt ...(snip)... [ 2.777433] ALSA device list: [ 2.777760] No soundcards found. [ 2.785662] uart-pl011 9000000.pl011: no DMA platform data [ 2.793530] VFS: Cannot open root device "(null)" or unknown-block(0,0): error -6 [ 2.794033] Please append a correct "root=" boot option; here are the available partitions: [ 2.794757] Kernel panic - not syncing: VFS: Unable to mount root fs on unknown-block(0,0) [ 2.796280] CPU: 0 PID: 1 Comm: swapper/0 Not tainted 4.18.0-rc4-next-20180713 #1 [ 2.796760] Hardware name: linux,dummy-virt (DT) [ 2.797221] Call trace: [ 2.797472] dump_backtrace+0x0/0x148 [ 2.797837] show_stack+0x14/0x20 [ 2.798087] dump_stack+0x90/0xb4 [ 2.798352] panic+0x120/0x27c [ 2.798577] mount_block_root+0x1a0/0x250 [ 2.798875] mount_root+0x11c/0x148 [ 2.799126] prepare_namespace+0x128/0x16c [ 2.799423] kernel_init_freeable+0x208/0x228 [ 2.799732] kernel_init+0x10/0x100 [ 2.800005] ret_from_fork+0x10/0x18 [ 2.800694] Kernel Offset: disabled [ 2.801107] CPU features: 0x21806082 [ 2.801400] Memory Limit: none [ 2.802136] ---[ end Kernel panic - not syncing: VFS: Unable to mount root fs on unknown-block(0,0) ]---
このようにmount_rootでpanicする場合は、qemuの -initrdオプションか、指定しているファイルをご確認ください。
コメント一覧
- コメントはありません。
この記事にコメントする
2018年7月17日
エアコンが臭い
「エアコンの嫌なニオイが完全に消えた」 "窓全開、16度で1時間つけっぱなし" で本当にニオイが取れる理由 - ねとらぼ を読んで。
こんなの嘘だろ…、と思ってうちの8年モノ(2010年製)のエアコンにやってみたら、素晴らしい効き目でした。運転開始から冷風がでるまでの、放置した雑巾のような臭いが、完全に消えました。
この効果はいつまで持つのか気になるので、また臭くなった時に備えて、いつ浄化したか思い出せるようにしておきます。
騒音に注意
ちなみにエアコンを16度で全開運転すると、壊れるんじゃないかと思うくらい、室外機が唸り始めて、非常にうるさいです。
暑いけれど、昼にやった方が良いと思います。夜やると近所迷惑です。
メモ: 技術系の話はFacebookから転記しておくことにした。
コメント一覧
- コメントはありません。
この記事にコメントする
2018年7月21日
Bluetooth UART変換
UARTをBluetoothに変換してくれるHC-06(モジュールの販売サイト、仕様書も置いてある)モジュール搭載ボードを買いました。技適マークが無いように見えます、これ日本で使ったらダメな奴かな…?
電源は5Vで、UARTは3.3Vです。ArduinoとかRaspberry Pi用のUSB - UART変換ケーブルを使えば、電源からUARTまで全ての線が揃っているはずです。Raspberry Piに繋いでも動きます。
私が購入したボード(HiLetgo製ZS-040)の場合、電源を入れるとLEDが点滅し始めます。この状態でBluetoothデバイスの検索を行うとHC-06という名前(変更可)のデバイスが見つかりますので、ペアリングします。PINは1234です(変更可)。
ペアリングするとCOMが2つ増えると思います。なぜ2つなのか良くわかりません。片方はうんともすんとも言いませんので、使いません。もうひとつのやや接続に時間が掛かる方を使います。
2つのCOMのどちらを使うべきかは、LEDで見分けることができます。LEDが点滅→点灯に変わる方が本物(?)です。まあ、両方繋いでも問題は起きないようなので、面倒なら両方繋いでしまえば良いと思います。
設定の変更
ペアリングを解除した状態(LEDが点滅)にすると、HC-06の設定を変更することができます。シリアルの設定は、ボーレート9600、8ビット、パリティなしにします。
このデバイスは送った文字をエコーバックしないので、ローカルエコーを強制的にONにしてください。またキーボードで入力すると、ATコマンド先頭のAT二文字を打った段階で「OK」が返ってきてしまい、コマンド発行ができません。コマンド全体をメモ帳などに打ち、コピペで貼り付けるとうまくいきます。
メモ帳からコピペはイマイチなので、ライン編集モードをONにすれば良いだろと思ったら、行の最後にCRが送られてしまうためか、AT+PINコマンドなどがうまくいかなくなります。
デバイス名、つまりBluetoothデバイスの検索のときに出てくる名前です。デバイス名を変更するにはAT+NAMEの後に名前を打ちます。例えば "HC-06-1" に変えたければAT+NAMEHC-06-1を送ります。大文字と小文字は区別されます。返事にOKsetnameと返ってくれば成功です。
またPINを変える際はAT+PINを送ります。例えば8888に変えたければAT+PIN8888です。返事にOKsetPINと返ってくれば成功です。
シリアルの設定を変更するコマンドもあります。興味があれば仕様書を見てくださいまし。
コメント一覧
- コメントはありません。
この記事にコメントする
2018年7月22日
ROCK64購入
目次: ROCK64/ROCKPro64
Rockchip RK3328搭載のシングルボードコンピュータ、ROCK64 4GB版を買いました。秋月電子で6,500円くらいでした。メモリの少ない1GB版にすると、さらにお安いです。
ROCK64はSDカードから起動できます。OSイメージは開発元が用意しているEtcherを使うと(GitHubからダウンロードできます)ダウンロード+SDカードへの書き込みが簡単にできます。便利です。
しかし手持ちのSDカードが4GBだったため、Etcherに8GBのカードを入れろと言われてしまい、OSイメージが書き込めませんでした。
最近は暑すぎて、電器屋に行くのさえ辛いですが、こればかりは行くしかないですね。昼の外出は危険だと思い、夕方にしましたが、それでも暑いです。
汗だくになりつつ16GBのSDカードを買ってきてDebianを書き込み、起動しましたがシリアルが出ません。何でだ。
ROCK64の爆速UART
どうしてROCK64のUARTが表示されないのかなと思ってググってみたら、ボーレートがまさかの1.5Mbpsでした(サポートフォーラムへのリンク)。UARTで1.5Mbpsなんてボーレート初めて使いました。
偶然、手持ちのFT232R(USB-UART変換チップ)が1.5Mbpsに対応していてラッキーでした。一方のHC06(Bluetooth-UART変換チップ)は1.5Mbpsに対応しておらず、UARTを無線化しようと思ってせっかく買いましたが撃沈です…。
シリアルを見ていると、独自ローダー(?)、ATF(ARM Trusted Firmware)、U-Bootの順に動いており、U-Bootはdistro bootを使ってLinux 4.4.77をロードしているようです。
リセットからU-Boot手前までのログ
DDR version 1.06 20170424 In SRX LPDDR3 786MHz Bus Width=32 Col=11 Bank=8 Row=15/15 CS=2 Die Bus-Width=32 Size=4096MB ddrconfig:7 OUT Boot1 Release Time: 2017-05-18, version: 2.43 ChipType = 0x11, 187 emmc reinit emmc reinit SdmmcInit=2 20 SdmmcInit=0 0 BootCapSize=0 UserCapSize=14832MB FwPartOffset=2000 , 0 StorageInit ok = 48105 Raw SecureMode = 0 SecureInit read PBA: 0x4 SecureInit read PBA: 0x404 SecureInit read PBA: 0x804 SecureInit read PBA: 0xc04 SecureInit read PBA: 0x1004 SecureInit ret = 0, SecureMode = 0 LoadTrustBL No find bl30.bin No find bl32.bin Load uboot, ReadLba = 2000 Load OK, addr=0x200000, size=0x92d74 RunBL31 0x10000 NOTICE: BL31: v1.3(debug):f947c7e NOTICE: BL31: Built : 09:28:45, May 31 2017 NOTICE: BL31:Rockchip release version: v1.3 INFO: ARM GICv2 driver initialized INFO: Using opteed sec cpu_context! INFO: boot cpu mask: 1 INFO: plat_rockchip_pmu_init: pd status 0xe INFO: BL31: Initializing runtime services WARNING: No OPTEE provided by BL2 boot loader, Booting device without OPTEE initialization. SMC`s destined for OPTEE will return SMC_UNK ERROR: Error initializing runtime service opteed_fast INFO: BL31: Preparing for EL3 exit to normal world INFO: Entry point address = 0x200000 INFO: SPSR = 0x3c9
U-Bootの起動ログ
U-Boot 2017.09-g5aef9f7 (Oct 12 2017 - 09:11:39 +0000), Build: jenkins-linux-build-rock-64-136 Model: Pine64 Rock64 DRAM: 4 GiB MMC: rksdmmc@ff500000: 1, rksdmmc@ff520000: 0 *** Warning - bad CRC, using default environment In: serial@ff130000 Out: serial@ff130000 Err: serial@ff130000 Model: Pine64 Rock64 Net: eth0: ethernet@ff540000 Hit any key to stop autoboot: 0
U-Bootの日付は2017年で、まだ新し目ですが、Linuxはかなり古いですね。後でUpstreamカーネルに入れ替えてみましょうか。
コメント一覧
- コメントはありません。
この記事にコメントする
2018年7月23日
ROCK64とU-Bootのdistro boot
目次: ROCK64/ROCKPro64
昨日(2018年7月22日の日記参照)に引き続き、ROCK64をいじっています。
私も先日知ったばかりで、さほど詳しくありませんが、distro bootはかなり便利です。ROCK64のSDカードはmmc 1です(※)ので、SDカードにFATかext2のパーティション(例えば6番目だとする)を切ってmkfsしておいて、
sysboot mmc 1:6 fat 0x500000 /extlinux/extlinux.conf
このようなコマンドを実行すると、extlinux.confに書いてある設定に従ってカーネルをロードしてくれます。Debianなどもこの設定ファイルを使えば起動できて便利です。
アプリの開発者ならばdistro bootの方が速いし楽でしょう。カーネルの開発者ならばTFTPブートの方が嬉しいかもしれません。SDカードを抜き差しせずに済みます。
一応ROCK64でカーネルをセルフコンパイルすれば、PC要らずで自己完結できますし、SDカードの抜き差しも要りません。しかしROCK64は、さすがにコンパイルに使うには遅いので、クロスコンパイル+TFTPブートの方が効率は良さそうです……。
(※)ROCK64のU-Bootから見ると、SDカードはmmc 1です。オプションで売っているeMMCボードがmmc 0らしいです。私はeMMCボード持ってないので、詳細はわかりません。
Upstreamカーネル
U-Bootのdistro bootのお陰で、カーネルの入れ替えはとても楽です。ROCK64のカーネルを4.4からupstreamのlinux-nextに入れ替えてみたところ、本当に入れ替えたのか不安になるくらい、何も問題なく起動しました。Rockchipやるなあ…。
RockchipはOpenSourceプロジェクトWiki(Wikiへのリンク)があり、ブートローダーから全てOSSで動かせるようです。ブートローダーは隠されていて、ソースコードを見るなんて有り得なかった時代に比べると、隔世の感です。
Rockchip以外にもAllWinnerもLinuxへのupstream活動は盛んなようで、upstreamカーネルが動く可能性が高そうです。AllWinnerのボードは何が良いんでしょうね?お手頃感ではNanoPi NEO 2でしょうか?
RockchipもAllWinnerもシングルボードコンピュータに多く採用されており、性能もなかなかですし、とても安く手に入ります。決して速くないマイコンボードが1枚何万円もしていた時代に比べると、ありがたい時代になったと思います。
ブートローダーにもチャレンジ
ブートローダーも最新版に入れ替えようと思い、Rockchip Opensource Wikiに乗っていた手順を試しましたが、ちょっと内容が古いのかU-Bootのビルドは通りますが、ATFのビルドはコケてしまいました。
Wiki曰くSDカードの0x40セクタに2ndブートローダーを置けば良いらしいですが、U-Boot SPLは廃止されてしまいましたし、ATFはビルドが通らなかったため、肝心のブートローダー(U-Boot SPLもしくはATF BL31)が作れません。困った。
現状、ブートローダーを変更したい積極的な理由も特にないので、ブートローダーのビルドはまた今度ですね。
コメント一覧
- t4さん(2018/07/29 22:33)
> U-Boot SPL は廃止されてしまいましたし...
廃止されてないけど、どこを見たんでしょう? - すずきさん(2018/07/30 15:33)
>t4 さん
ご指摘ありがとうございます。
トップディレクトリ下にある spl というディレクトリも、u-boot-spl.bin も生成されないため、廃止されたのかと思いました。 - t4さん(2018/07/31 10:06)
https://github.com/rockchip-linux/u-boot
https://github.com/ayufan-rock64/linux-u-boot
http://git.denx.de/u-boot.git/
一応 1番上がこのデバイスの本家だけど
他所は、本家の品質が悪るすぎて Pull-Request を蹴ってるような状況
どこからGetしたのかな?
本家のヤツには tpl/spl はそのまま残ってる(品質は別として)
本家はものは、ビルドが通らないとか、クラッシュするとか、
真っ当な issue を報告しても無視して即刻 Close とか
ハッキリ言って Pull-Request を蹴られても当然の酷いレベル
linux-kernel とか その他諸々も、 総じてそんな感じ。
そんな理由もあって
よほどのアドバンテージが無い限り、大概の処は 古いやつを 使ってる
んでも、彼らはデバイスメーカーしか知らない情報を持ってるからね
- すずきさん(2018/07/31 10:36)
> t4 さん
使っているのは、
http://git.denx.de/u-boot.git/
です。
> 本家はものは、ビルドが通らないとか、クラッシュするとか、
> 真っ当な issue を報告しても無視して即刻 Close とか
> ハッキリ言って Pull-Request を蹴られても当然の酷いレベル
> linux-kernel とか その他諸々も、 総じてそんな感じ。
なんと、そうなんですか。情報ありがとうございます。
> そんな理由もあって
> よほどのアドバンテージが無い限り、大概の処は 古いやつを 使ってる
> んでも、彼らはデバイスメーカーしか知らない情報を持ってるからね
デバイスメーカーしか知らない情報で、公開できる範囲の情報を
Linux や U-Boot の Upstream に公開してくれている、
と思っていたのですが、そううまくは行っていないということですね。
Linux はとりあえず
git://git.kernel.org/pub/scm/linux/kernel/git/next/linux-next.git
が動作するようなので、ブートローダはそっとしておいて、こちらで遊ぼうかと思っています。
- t4さん(2018/08/01 12:26)
誰でも見れる情報として公開されているのはこれぐらい
http://opensource.rock-chips.com/images/9/97/Rockchip_RK3328TRM_V1.1-Part1-20170321.pdf
中をみて見てみれば解るけど、この情報で弄れるのはベーシックなI/O程度がせいぜい
込み入ったI/O usb, ether, gpu, vpu の類は何も無し。
データシート/アプリケーション・ノートの代わりに、ソース・コードを公開
って方針なんだろうけど
まぁ、詳細資料は出したくない ってのは理解できる
しかし、
公開のサンプル・コードが上手く動かない場合、リバースしながら尚且つ推測もしなければならない
リバースは良しとしても、推測には限界があるよね。
真摯に issue に対応してくれれば、資料非公開でも一向に構わないんだが…
git.denx.de: 確か昨年蹴られてたね reason: build-error
issue を報告した人達: オマエの処には2度と報告しない
Armbianの人: 怒ってた、俺らのポーティング終わる前にぶっ壊れる(新しいヤツが)
グチっぽくなったけど、
それでも pi とに比べれば資料は多い方だとは思うな
---
お付き合い、ありがとうございました。
- すずきさん(2018/08/01 20:28)
> t4 さん
> 誰でも見れる情報として公開されているのはこれぐらい
> http://opensource.rock-chips.com/images/9/97/Rockchip_RK3328TRM_V1.1-Part1-20170321.pdf
> 中をみて見てみれば解るけど、この情報で弄れるのはベーシックなI/O程度がせいぜい
> 込み入ったI/O usb, ether, gpu, vpu の類は何も無し。
私も、ビデオデコーダや映像出力系の仕様を見たかったのですが、
Rockchip OSS Wiki には、残念ながら載っていないです。
グラフィクスも Mali Utgard 系ですが、
ARM は Mali のドライバ(ユーザ空間側)を公開していないので、
カーネルモジュールだけあっても、どうにもなりません…。
> データシート/アプリケーション・ノートの代わりに、ソース・コードを公開
> って方針なんだろうけど
> まぁ、詳細資料は出したくない ってのは理解できる
確かに、社内の抵抗は強そうです。
> しかし、
> 公開のサンプル・コードが上手く動かない場合、リバースしながら尚且つ推測もしなければならない
> リバースは良しとしても、推測には限界があるよね。
> 真摯に issue に対応してくれれば、資料非公開でも一向に構わないんだが…
>
> git.denx.de: 確か昨年蹴られてたね reason: build-error
> issue を報告した人達: オマエの処には2度と報告しない
> Armbianの人: 怒ってた、俺らのポーティング終わる前にぶっ壊れる(新しいヤツが)
Rockchip は OSS とのコラボがうまく行っている方だと思っていたのですが、
実情はなかなか、そううまくは行かないのですね。
邪推ですが Rockchip 社が OSS 貢献する社員にどれくらい
好感触を持つか次第で OSS との付き合い方は変わりそうですね。
> グチっぽくなったけど、
> それでも pi とに比べれば資料は多い方だとは思うな
>
> ---
> お付き合い、ありがとうございました。
こちらこそ、貴重な情報ありがとうございました。
安価なワンボードコンピュータは普及しましたが、
完全にオープンになった HW はまだ先なのでしょうね。
いつかどこかが作る(古い SoC を公開するとか、そんな形でも)
と期待しています。
この記事にコメントする
2018年8月4日
レガシィの4回目の車検
目次: 車
先週、大阪スバル(高槻店)にレガシィの車検をお願いしていました。今日は納車です。
JR高槻駅からディーラーまで歩きましたが、もう、とにかく暑い暑い。暑くてやってられません。将来、車を買い替えるとしたら、夏には絶対、車は買わないぞ、絶対だ。心に決めました。
料金は自賠責&税金込みで13万円くらいでした。特に大きな故障もなかったし、そんなもんでしょう。ね。
コメント一覧
- hdkさん(2018/08/05 01:16)
車検の時はいつも代車借りてます。駅やバス停は近いけど、タダで貸してくれるので... トヨタ系ディーラーだからですかね? でも最初中古車買った店も貸してくれていました。駅から 1km もあるのに代車なしだとつらいですね。 - すずきさん(2018/08/05 01:25)
> hdk さん
スバルも代車を貸してくれますが、今回は長期間(1週間)預けていたことと、8月は休みが多いせいか、単に繁忙期なのか、貸せる代車が無いと言われました…。
この記事にコメントする
2018年8月5日
微妙に壊れてるThinkPad E480のキーボード
先日購入(2018年6月14日の日記参照)したThinkPad E480ですが、キーボードのカーソルキー、しかも上カーソルキーだけが微妙に壊れています。
キーを押すとキーが傾いてしまい、引っかかって戻ってこないときがあります。
キーを分解してみた
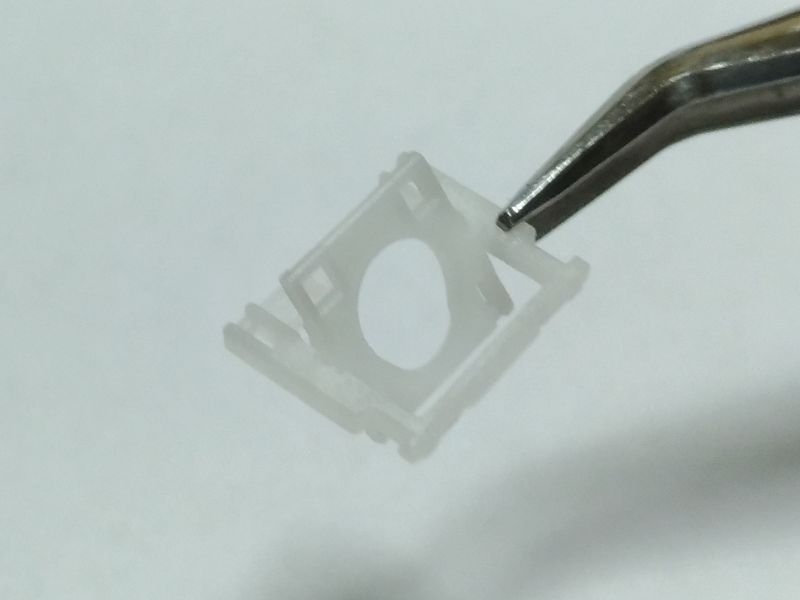
何が引っかかっているのか調べるために分解してみました。キートップをてこなどで外すと、パンタグラフが入っています。パンタグラフは2つの部品からできています。
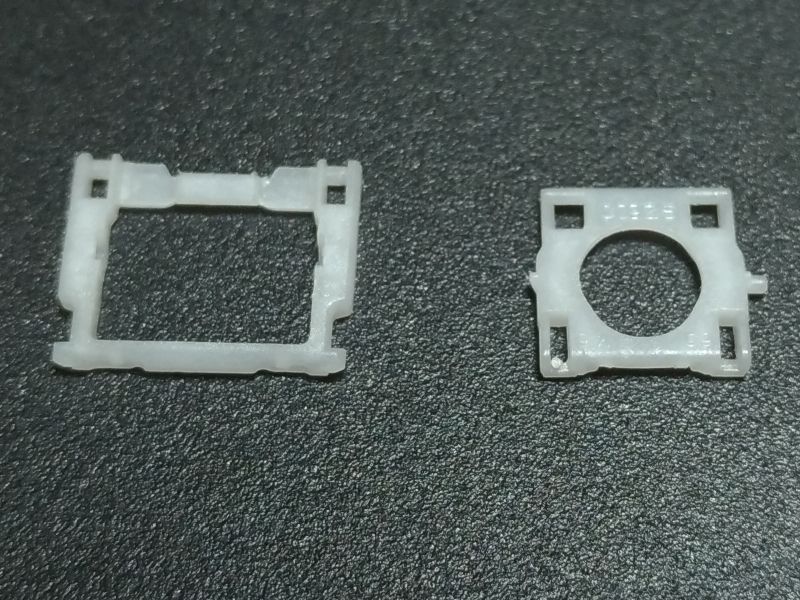
2つの部品を組み合わせると、I字型(畳んでいるとき)もしくはX字型(開いているとき)になります。

良く見るとこの部品、軸が折れてしまっています。
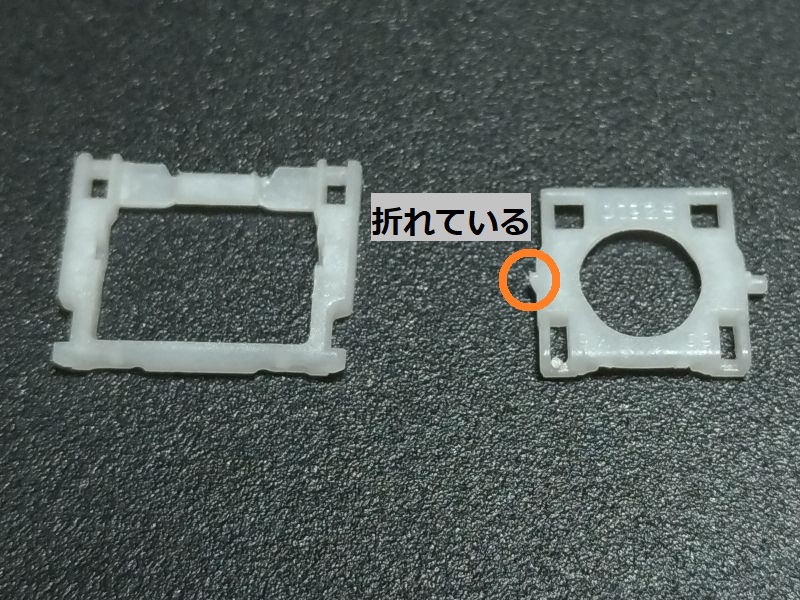
軸が片側なくなっているため、パンタグラフを開いても綺麗なX字型にならず、捻じれてしまいます。
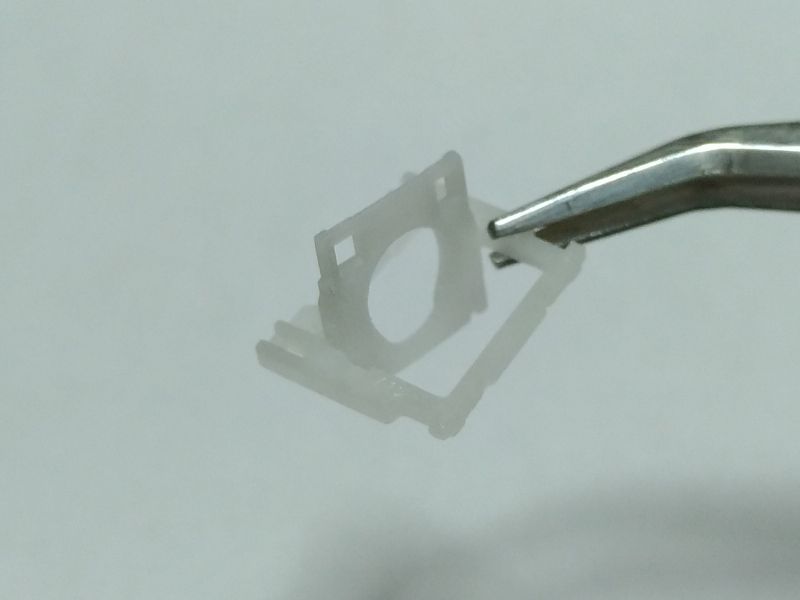
キーボードのパンタグラフ、開いた状態、軸が折れているので歪む
これによってキートップが若干傾いてキーボードのフレームに引っかかり、元の位置に戻らなくなるようです。
対策
修理に出そうかどうか迷って、いろいろ押し方を試しているうちに、比較的引っかかりにくい押し方があることを見つけました。今は押し方を工夫することで凌いでいます。
さらに最近は、普通にキーを押しても引っかかりにくくなった気がします。パンタグラフが壊れているのは相変わらずなので、キートップ側が削れたのか、変形したのかな?
コメント一覧
- コメントはありません。
この記事にコメントする
2018年8月8日
久しぶりに自作ARMエミュレータ
久しぶりに自作ARMエミュレータememuを(ソースコードはこちら)動かそうと思い、Linux 4.4のlatestである、Linux 4.4.146をダウンロードしました。
このememuではARM Versatile PB/APボードの一部デバイスと、CPU ARM926EJ-Sの一部、アーキテクチャで言えばARMv5T相当をエミュレーションしています。
クロスビルドできない
巷で手に入るコンパイラはARMv5Tより新しい命令を出力してしまい、エミュレータで実行できませんので、最初にcrosstool-ngで、ARMv5T向けのgcc 8.1.0を作成しました。
いざLinux 4.4.146をクロスビルドしましたが、エラーになり、コンパイルできませんでした。
エラーの意味が良く分からなかったので、さっくり諦めましてcrostool-ngでgcc 7.3を作成しなおし、ビルドをやり直したところ、無事コンパイルが通りました。
Linuxが動かない
Linux 4.4.146は起動しませんでした。偶然持っていた少し古いバージョン(Linux 4.4.77)に戻したりもしましたが、結果は同じで全く起動しません。
デバッグすると、ドライバの作りが変わったのかAACIとMMCIというハードウェアに対して、今まで叩いていなかったはずのレジスタをガンガン叩いていました。ememuは存在しないI/Oレジスタを叩くと、エミュレータが例外で落ちてしまい、動かなくなるんです…。
とりあえずレジスタ定義だけ適当に追加したところ、エラーが出まくりますが、起動はしました。適当でも動いてくれるLinuxは強い子です。
buildrootが動かない
しかし今度はbuildrootで作成したbusyboxと愉快な仲間たちが起動しません。/dev/nullが無いよ?と永遠にエラーが出続けます。
調べてみるとLinux 4.4.146のdefconfigだとCONFIG_DEVTMPFSがnつまり無効なんですね。最近の感覚でdevtmpfsはあって当然くらいに思っていたので、盲点でした。コンフィグでdevtmpfsを有効にしてカーネル再ビルドしたところ、やっとbuildrootが動きました。
端末の色がおかしい
対応していない制御文字を送ってきているらしく、ememuの端末(独自実装です)の色がおかしくなります。
これはすぐ直せそうになかったので、しばらくは変な表示と付き合うことになりそうです。
コメント一覧
- すずきさん(2018/08/09 01:09)
後でやりなおしたら gcc 8.1.0 でも Linux 4.4.146 をコンパイルできました。あのエラーは何だったんだろう。幻でも見ていたんだろうか??
この記事にコメントする
2018年8月10日
エディタ
誰しもお気に入りのエディタがあると思いますが、私は割とメチャクチャです。
C言語系は読むときはVim + GNU Global、書くときはサクラエディタを使うことが多いです。
Vimはタグジャンプやヒストリが優秀で、検索もしやすいので、コードを読む際にはとても便利だと思います。ログを差し込んだり、コードを多少書き換える程度であればVimで済ませます。
しかし1から全て書くような場合は、サクラエディタが多いです。何ででしょうね?関数表示が便利なのかな?そんなサクラエディタもC++ を書くときはイマイチで、ラムダがまともに表示されず不便です。
GVimでtabと :Tlistを使うとサクラエディタの関数表示に近くて、個人的には良い感じですが、常用には至っていません。何が悪いのかわからない…。
Javaは読むことはあまり無いけどVimですかね、書くときはIntelliJ IDEAです。スクリプト系はVimで読むし、書きます。
こうして並べてみると、かなり支離滅裂です。どうしてこうなった…??
VimとEmacsの思い出
VimもEmacsも初めて使ったとき「は?何だこれ……??」と思いました。どちらも終了方法がわからず、まともに使えませんでした。今はIDEもVimも適度に使っています。
でもEmacsは完全に使い方を忘れてしまった。ごめんねEmacs…。
コメント一覧
- コメントはありません。
この記事にコメントする
2018年8月11日
地震保険
AIG損害保険から「大阪北部地震で被害を受けた方はご連絡ください」という手紙が来て、地震保険に加入していたことを知りました。ずっと火災保険だと思ってたよ……。
人生初の地震保険です。
保険会社に被害を申請(電話、Webでも可能)すると、調査員さんが家に来てくれます。調査員の方は、かなり積極的に被害としてカウントしてくれます。むしろ、こちらが「いやー、そこは特に被害無かったですね…」と断るような形になるくらいでした。
家財の場合、壊れなくても、地震で倒れたりズレたら被害としてカウントされるそうです。あと、地震保険で特徴的なのは、被害を受けた「種類」が大事なことです。本が1冊でも100冊でも、カウントは「本」の1種類のみですが、棚とテレビと冷蔵庫が地震でズレたり倒れたりすれば3種類としてカウントされ、被害が大きいとみなされるようです。
地震保険の査定額
地震保険は火災保険と違い損害額ではなく、保険金額(契約時に決めている額面)の何割という形で支払われます(地震保険 | 個人のお客さま | AIG損保へのリンク)。
我が家の場合、家財の「一部損」判定でした。この場合、地震保険金額の5%が支払われることになります。契約していた保険金額は100万円くらいだった(それも知らなかった…)ので、支払われる額は大体5万円です。
大阪北部在住で、地震保険に加入している人は、とりあえず被害申請をしてみるといいですね。判定結果が一部損(一番低い)でも、地震でグチャグチャにされた部屋の片づけ手間賃くらいにはなると思います。
査定方法
査定は結構面白いです。馬のフィギュアがテーブルから落ちてたら「被害です」、お皿が落ちたり転げたら割れてなくても「被害です」。逆に言うと、壊れた物の金額は勘案しないので、被害の受け方によっては被害額と保険の査定額が全く合いません。
しかし元々そういう保険なんです。火災保険や自動車保険とは仕組みが違うのですね。
保険会社がんばってる
AIG損害保険の調査員の方曰く、大阪北部地震と7月豪雨の被害調査を迅速に行うため、全国の調査員が応援に駆けつけているのだとか。今日来ていただいた方も北海道から応援に来ていると言っていました。
最近は特に暑いし、特に豪雨の地域では道路がやられていて、被災地を駆け回るにもとても大変らしいです。頭が下がる思いです。
コメント一覧
- コメントはありません。
この記事にコメントする
2018年8月12日
ARM PCで開発できるか?
最近のARM搭載SoCはかなり速くなっています。もしかしてx86 PCの代わりに使えるのではないでしょうか?開発に使うことを想定して、コンパイル速度を比較してみたいと思います。
比較に使うのはLinux Kernelの開発ツリー(linux-next)です。コンフィグはデフォルトを使い、ビルドターゲットはallを指定します。ビルドしているアーキテクチャが違う(ROCK64: arm64, AMD A10: x86)ので、時間の単純比較はできませんが、参考にはなると思います。
AMD A10 7800、32GB DDR3-1600のPCでlinux-next x86のtime make -j4 allを実行しますと、
- real 10m33.584s
- user 33m37.811s
- sys 4m7.908s
不遇のBulldozer系コア、もはや4年落ちとなったCPUで、大して速くはありませんが、十分実用的というか、待っていられるレベルです。
Intel Pentium J4205、16GB DDR3L-1600のPCでlinux-next x86のtime make -j4 allを実行すると、
- real 14m45.968s
- user 51m57.967s
- sys 5m47.331s
Pentium JはAtom系列で遅いと思いきや、予想より何倍も速かったです…。ナメてました、ごめんなさい。
ROCK64、Rockchip RK3328、Cortex A53 x 4、4GB DDR3でlinux-next arm64のtime make -j4 allすると、
- real 179m33.126s
- user 266m0.254s
- sys 22m52.046s
PCと比較するとほぼ1桁遅いです。さすがにこれは待っていられません。ROCK64は普段使いには十分速いですが、開発に使うのは辛そうですね…。
Raspberry Pi 3、Broadcom BCM2837、Cortex A53 x 4、1GB LPDDR2でlinux-next armのtime make -j4 allすると、
- real 146m46.807s
- user 236m43.970s
- sys 10m41.310s
ビルドしているアーキテクチャが違う(ROCK64はarm64、RasPi 3はarm)ので、単純比較はできませんけど、ROCK64と大差ないですね。
もっと速いARM SoCは?
今のところスマホ、TV/STB系ARM SoCはA72 x 4、A53 x 4が最強クラスのようです。サーバー系ARM SoCに目を向ければA72 x 16(NXP LX2160A)もしくはA53 x 24やA53 x 48(Cavium ThunderX)といった桁違いメニーコアがありますが、そんなに要らないんですよね…。
中間の製品はありません。買う人いないんでしょうね。
ARM SoC搭載ボード
今後のお買い物の参考に、ざざっと調べてみました。
- Tegra系
- ボードJetson TX2、Denver x 2、A57 x 4、8GB LPDDR4、$600日本だと販売店のぼったくりで10万円。
- HiSilicon Kirin 960
- ボードHiKey 960、A72 x 4、A53 x 4、3GB LPDDR4、$239良いんだけど、メモリがもう一声欲しかった…。
- Rockchip RK3399
- ボードNanoPC-T4、A72 x 2、A53 x 4、4GB LPDDR3-1866、$109 DDR3ではあるけど、良さそう。
- Samsung S5P6818
- ボードNanoPC-T3 Plus、A53 x 8、2GB DDR3、$75可もなく不可もなく?
- Amlogic S912
- ボードが見当たらない、A53 x 8、どこか発売してくれないかな。
- Amlogic S905
- ボードODROID C2、A53 x 4、2GB DDR3、$39 S912の一世代前ですね。
- AllWinner H6
- ボードPINE H64、A53 x 4、2GB LPDDR3-1600、$36安くて素敵だけど、さすがに見劣りしてしまうなあ。
性能だけ求めるならJetsonかHiKey 960で、コスパならNanoPC-T4ですかね。Jetsonなら流行りのAIとか、GPGPUも実験できますね。お値段はべらぼうですけど…。
コメント一覧
- すずきさん(2018/08/14 13:32)
Raspberry Pi 3 の結果も足しておいた。
この記事にコメントする
| < | 2018 | > | ||||
| << | < | 07 | > | >> | ||
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 31 | - | - | - | - |
こんてんつ
wiki Linux JM Java API過去の日記
2002年 2003年 2004年 2005年 2006年 2007年 2008年 2009年 2010年 2011年 2012年 2013年 2014年 2015年 2016年 2017年 2018年 2019年 2020年 2021年 2022年 2023年 2024年 過去日記についてその他の情報
アクセス統計 サーバ一覧 サイトの情報
合計:
本日:
